无刷直流力矩电机驱动控制设计和验证
李禹希,邓永停,赵金宇*,张 刘*
(1. 吉林大学 仪器科学与电气工程学院, 吉林 长春 130012;
2. 中国科学院 长春光学精密机械与物理研究所, 吉林 长春130033)
无刷直流力矩电机具有起动和调速性好,控制精度高和堵转转矩大等特点,近年来,在大型转台精密驱动控制方面应用越来越广泛[1]。转台驱动方式包括直接驱动、齿轮驱动和摩擦驱动等[2],相比后两种,直接驱动方式具有刚度高、非线性环节少的优点。转台的驱动控制精度受到无刷直流力矩电机性能的直接影响,电机的性能测试、驱动方案设计和指标测试是实现高精度转台精密控制的核心工作[3-8]。本文通过测试直流无刷电机反电动势波形,确定直接驱动控制的伺服方式,并通过搭建试验系统,测试了直流无刷力矩电机的控制效果。
首先开展电机反电动势波形的测量,方法是把3 个阻值相等的电阻星型连接,如图1 所示。将电机的U、V、W三相绕组分别与图1 所示的U、V、W标记处连接,手动连续匀速转动电机,利用三通道示波器观察图1 所示U、V、W的电压波形,即电机三相绕组的反电动势波形,如图2 所示。

图1 电阻连接方法Fig. 1 Resistance connection method

图2 电机三相绕组相反电动势波形Fig. 2 Inverse electromotive force waveform of motor three-phase winding
利用霍尔元件进行电机三相绕组的电子换向,具体方式如下。
相位差为120 电角度的霍尔传感器的输出信号如图3 所示。

图3 相位差为120 电角度的霍尔传感器的输出信号Fig. 3 Output signal of Hall sensor with phase difference of 120 electric angles
霍尔元件旋转一个电角度周期的3 个输出U、V、W的6 个状态组合为:101、100、110、010、011、001。
对无刷直流电机或者永磁同步电机进行控制的过程反映在电源转换的过程实际就是AC→DC→AC 的过程,AC→DC 的过程是将单项或者三相交流电经过整流、滤波转换为电机的直流母线电压DC,DC→AC 的过程是利用三相全桥驱动电路将直流母线电压转换为电机的三相绕组交流电,从而实现对电机电流的控制。三相全桥驱动电路如图4 所示。

图4 直流无刷电机的三相全桥驱动电路Fig. 4 Three phase full bridge drive circuit for brushless DC motor
全桥驱动电路的驱动方式有两两导通和三三导通,相比于两两导通,三三导通产生的转矩分量互有抵消,同时从控制的角度考虑,在每次换向时由3 个IGBT 同时导通,这就需要在上、下桥臂之间设置PWM 死区,死区设置必然影响转矩的波动,所以从总转矩和控制复杂度的角度考虑,利用两两导通的方法进行控制较好。
无刷电机的正反转是通过控制三相绕组的电流导通顺序来进行控制的,导通顺序与霍尔传感器的输出组合的关系如表1 所示。
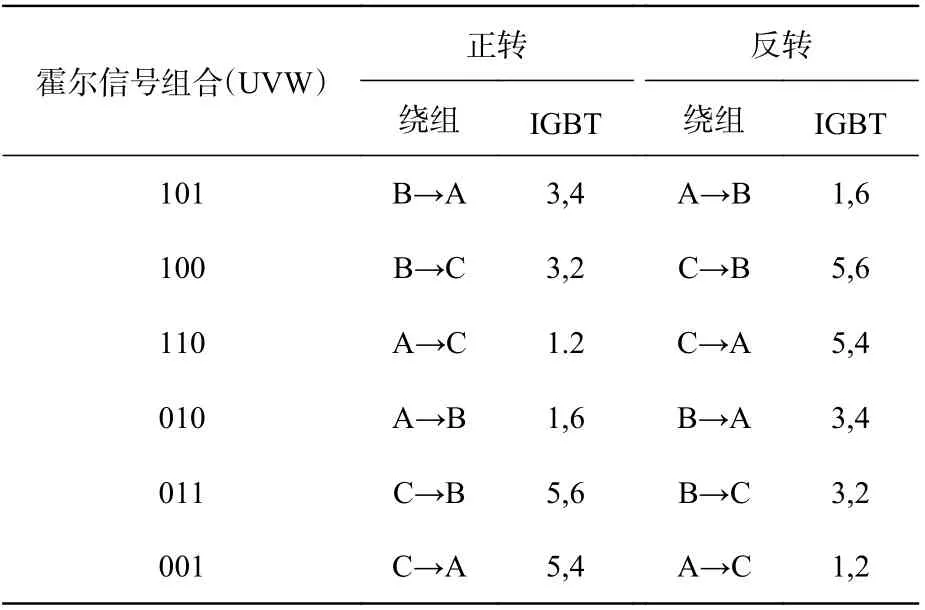
表1 电机正反转控制时序表Tab.1 Reversing control time-scale of motor
由无刷电机的反电动势波形和输出性能可知,无刷直流电机可以认为是永磁同步电机,其控制方案采用无刷直流电机的方波控制方式,该控制方式简单可靠。
3.1 无刷直流电机PWM 控制方式的选择
三相绕组两两导通方式的PWM 控制方式有5 种方法:PWM_ON、ON_PWM、H_PWM-L_ON、L_PWM-H_ON、H_PWM-L_PWM。
(1) PWM_ON 方式是:在每个IGBT 的120°导通角内,前60°进行PWM 控制,后60°保持常开。
(2) ON_PWM 方式是:在每个IGBT 的120°导通角内,前60°保持常开,后60°进行PWM 控制。
(3) H_PWM-L_ON 方式是:在120°导通角内,上桥臂IGBT 进行PWM 控制,下桥臂IGBT 保持常开。
(4) L_PWM-H_ON 方式是:在120°导通角内,下桥臂IGBT 进行PWM 控制,上桥臂IGBT 保持常开。
(5) H_PWM-L_PWM 方式是:在120°导通角内,上、下桥臂IGBT 进行PWM 控制。
从换向过程的转矩脉动角度来看:PWM_ON 方式的转矩脉动最小,ON_PWM 方式次之,H_PWM-L_PWM 方式的转矩脉动最小。
3.2 速度控制策略设计
在实际控制中,由于受电机电流和逆变器驱动电压的限制,当速度阶跃给定值较大时,控制器会出现由于积分饱和而导致的积分饱和现象。为了解决积分饱和现象引起的系统超调量大和调节时间长的问题,采用如图5 所示的具有抗积分饱和策略的速度PI 控制器。该控制策略将饱和非线性环节的输入与输出量的差值组成反馈支路来减小积分器的输入,以抑制积分饱和现象。
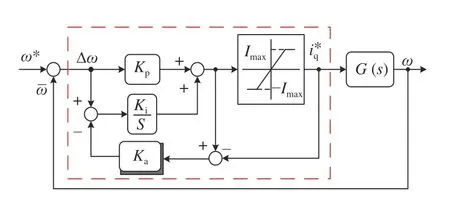
图5 基于抗积分饱和策略的速度PI 控制器Fig. 5 Speed PI controller based on anti-windup strategy
通过辨识获得的控制模型,可以计算出望远镜的转动惯量,在已知闭环速度带宽和相角裕度设计指标的条件下,速度控制器的表达式为:

其中,JTel为望远镜的转动惯量, ωsc为速度回路的闭环带宽, φm为速度回路的相角裕度。
3.3 位置控制策略设计
位置控制器采用PID 控制器,表达式为:

控制器的参数由系统控制性能指标决定,对于采用直接驱动方式的望远镜,其频率特性在低频段接近纯刚体模型,因此位置控制器的参数设计如下:
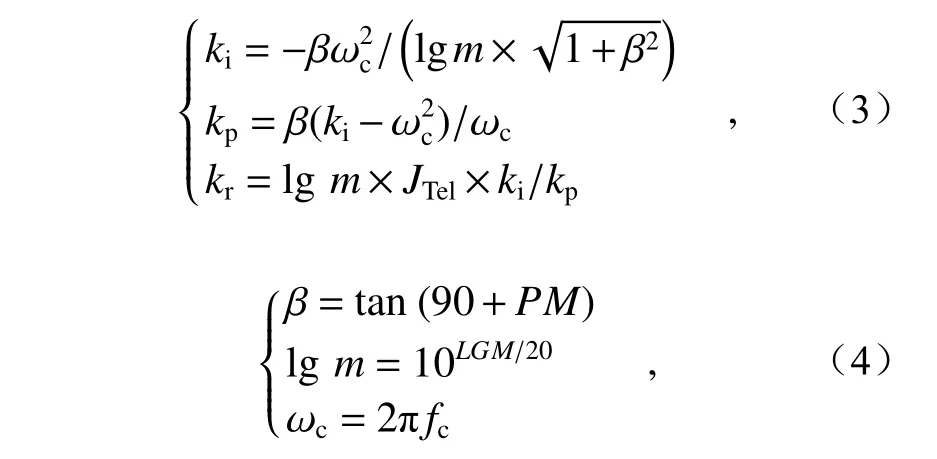
其中,fc(Hz)为 开环剪切频率,PM(deg)为相角裕度,LGM(dB)为幅值裕度。相角裕度是指对于稳定的系统,如果系统的开环频率特性再滞后PM度,则系统将处于临界稳定状态;
幅值裕度是指对于稳定的系统,如果系统的开环频率特性的幅值再降低LGM分贝,则系统将处于临界稳定状态;
由式(3)可以看出,比例系数kr由系统的转动惯量JTel决定,因此,控制器的比例系数较大。为了提高系统的抗扰动能力,可以增大开环频率特性的剪切频率fc,同时降低系统的相位裕度PM和幅值裕度LGM。位置控制器的带宽设计目标是使fc尽量靠近锁转频率,通常为锁转频率的30%~40% 。
3.4 试验平台和程序设计
控制器实验硬件:单片机C8051F120+CPLDEPM 570T100C5N,实验平台如图6 所示。

图6 电机控制系统硬件平台Fig. 6 Hardware platform of control system
试验系统采用的电机不带增量式编码器,需要自己安装编码器,试验采用的编码器是4 096线,四倍频后可达到16 384 线分辨率。为保证Z脉冲与电机电角度0 点对齐,采用的办法是:首先给电机一定的控制电压使电机旋转起来,利用单片机的I/O 口的捕捉功能捕到Z脉冲的上升沿,并以此为零点开始计数和定位。
单片机完成Z脉冲的捕捉即寻零点,通过TL16C752 与上位机进行数据通信、编码器计数脉冲的读取、位置环和速度环的控制器计算、液晶实时数据的显示等。CPLD 完成电机的电子换向、A、B 码的计数、PWM 波形的产生和协同单片机进行通信。为了实现电机控制数据的接收和实时数据曲线的显示,利用Labview 设计了伺服控制数据通信接收程序,通过串口进行与控制器的通信,控制界面如图7 所示。
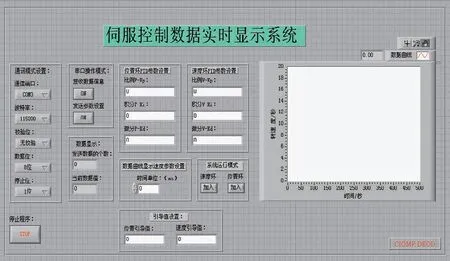
图7 伺服控制数据显示界面Fig. 7 Data display interface of servo control system
4.1 电机速度开环测试
系统的采样周期为2 ms,编码器每个码值分辨率为0.022°。图8 为结果。电机转速码值设定为5,此时由于受电机转矩波动的影响,电机的旋转不平滑,转速波动为上限3 个码,下限3 个码。上升时间小于0.4 s。

图8 转速码值设定为5 时的转速响应曲线(控制器参数k p=60.0,k i=2.0)Fig. 8 Rotate speed response curve when the rotate speed code value is set to 5 (control parametes k p=60.0,k i=2.0, PositionSet=5)
图9 结果分析:电机转速码值设定为50,此时由于电机转矩波动的影响较小,电机的旋转相对平滑,转速波动为上限5 个码,下限5 个码,统计速度波动RMS 值小于7%,上升时间0.4 s。

图9 转速码值设定为50 时的转速响应曲线(控制器参数k p=60.0,k i=2.0)Fig. 9 Rotate speed response curve when the rotate speed code value is set to 50 (control parameters k p=60.0,k i=2.0, PositionSet=50)
同理,设定速度每隔2 s 增加10 个码,得到如图10 所示的速度阶跃响应曲线。

图10 速度阶跃响应曲线(控制器参数k p=60.0,k i=2.0)Fig. 10 Curve of the speed step response (control parametes k p=60.0,k i=2.0)
4.2 位置定点闭合实验
采用参数整定仿真,参数设置为:kp=0.01,ki=0.02,PositionSet = 100 码时,位置阶跃曲线如图11 所示。如图11 所示,当电机经过稳态值时,电机会进行电子换向,出现较大的波动,并且电机定位精度的重复性较差。优化调整整定参数,当位置环参数设置为:kp=0.015,ki=0.015,PositionSet=1 000码时,位置阶跃曲线如图12 所示,定点精度小于1 个码值,稳定响应时间小于1 s。
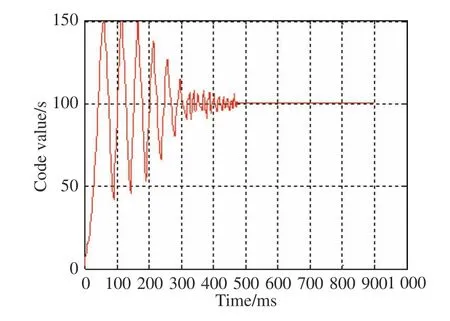
图11 位置阶跃曲线(k p=0.01,k i=0.02,PositionSet = 100)Fig. 11 Curve of the position step response (k p=0.01,k i=0.02,PositionSet=100)

图12 位 置 阶 跃 曲 线(k p=0.015,k i=0.015,PositionSet=1 000)Fig. 12 Curve of position step response (k p=0.015,k i=0.015,PositionSet=1 000)
本文通过对电机的电气特性、正反转时序设计、伺服控制设计、参数整定试验等各环节,完整验证了无刷直流电机的控制过程,实现了无刷直流电机的转速闭环和位置闭环控制。所设计的无刷直流电机控制系统具有响应快速,定点精度高等特点。当电机以1°/s 的低速转动时,速度波动小于7%,大角度调转位置闭合定点精度小于1 个码值,实现了无刷电机的宽调速范围和高精度控制,验证了设计的无刷直流电机驱动和算法的有效性。
猜你喜欢 直流电机导通三相 基于模糊PID的无刷直流电机速度控制系统的设计与仿真大电机技术(2022年5期)2022-11-17基于模糊自适应ADRC的无刷直流电机控制技术汽车实用技术(2022年12期)2022-07-05浅谈低压三相异步电机启动保护的选择与应用防爆电机(2022年3期)2022-06-17新型接地导通测试流程分析策略分析内蒙古电力技术(2021年5期)2021-11-21基于Petri网的无刷直流电机混合导通DSP控制方法莆田学院学报(2021年5期)2021-11-13笼型三相异步电动机的起动和调速解析防爆电机(2020年5期)2020-12-14基于Motor-CAD三相异步感应电机仿真计算分析防爆电机(2020年3期)2020-11-06串联晶闸管同步导通设计研究速读·下旬(2019年3期)2019-04-11三相异步电动机正反转的控制设计电子制作(2019年23期)2019-02-23基于FPGA的双绕组无刷直流电机软件设计电子制作(2017年1期)2017-05-17栏目最新:
- 2024年度在理论学习中心组关于群众路线...2024-01-16
- 在退役军人事务工作领导小组会议上讲话...2024-01-15
- 中秋国庆队伍教育管理工作动员部署会议...2024-01-15
- 2024年度区委书记在文旅农康融合发展大...2024-01-14
- 医院纪检监察干部队伍教育整顿个人党性...2024-01-14
- 教师演讲稿:牢记育人使命,涵养高尚师德...2024-01-13
- 2024年组织部长在市委理论学习中心组专...2024-01-13
- 2024年区人民法院案件质量评查办法(2篇...2024-01-13
- 2024年区长在指导某街道干部作风建设动...2024-01-11
- 在公司成立周年大会上讲话(3篇)(完整...2024-01-10
相关文章: