多足机器人运动控制研究
秦海鹏 胡家信 朱小明
多足机器人运动控制研究
秦海鹏 胡家信 朱小明
(长安大学工程机械学院,陕西 西安 710064)
文章根据生物运动的控制方式,进行了仿生六足机器人的运动控制方式的研究。首先通过Solidworks软件完成仿跳蛛的六足机器人的机械本体设计,确定机器人本体的各项参数;
之后根据仿生跳蛛的腿部结构模型,建立相应的D-H数学模型,通过分析跳蛛的运动方式和运动机理以及运用相关的数学知识,完成仿生跳蛛单腿的正逆运动学求解;
最后建立基于MATLAB-Adams的虚拟样机仿真平台,完成基于位置控制的机器人直线运动的仿真分析。
六足机器人;
D-H模型;
运动学
随着科学技术的快速发展,机器人技术成为一个不可避免的话题。与此同时,在制造业、农业和服务业等行业的不断刺激下,人们已经不再满足于传统的机器人,开始寻求一种更能满足人类需求的高智能机器人,于是科学家希望可以在自然界中找到具有高超的运动能力和精准的控制能力的生物,并以此为模型,制造出符合时代需求的现代化机器人。于是在这样的背景下,仿生机器人[1]应运而生。相比较四足,六足在稳定性和准确性等方面有了一定的提升,而且可以使机器人适应更加恶劣的工作环境。跳蛛是自然界中较为常见的生物,运动灵活,具有多自由度的腿部,本文所论述的机器人是基于跳蛛的生理结构和运动原理设计的,仿跳蛛机器人具有高灵活度和易复制的优点,即使在较差的路况或者单腿出现损坏的情况下也可以稳定行走。
为了尽可能地仿照自然界的生物运动,达到高度仿生化的目的,一个合适且稳定的实验平台是必不可少的。该实验平台应该具有一定的承载能力,可以在平台上搭建控制装置、检测装置和反馈装置[2]以及信息处理装置等;
控制装置可以控制平台的运动方式,通过改变相对应的运动参数,使平台具有多种稳定的运动模式;
检测装置可以实时监测平台的各项参数,如平台行进的距离和转过的角度等;
反馈装置可以及时反馈各种运动信息至控制系统,及时对突发情况做出处理措施;
而信息处理装置是实现控制装置、检测装置和反馈装置的功能的基础,只有及时接收和传递实时信息,才能实现平台的平稳运动。
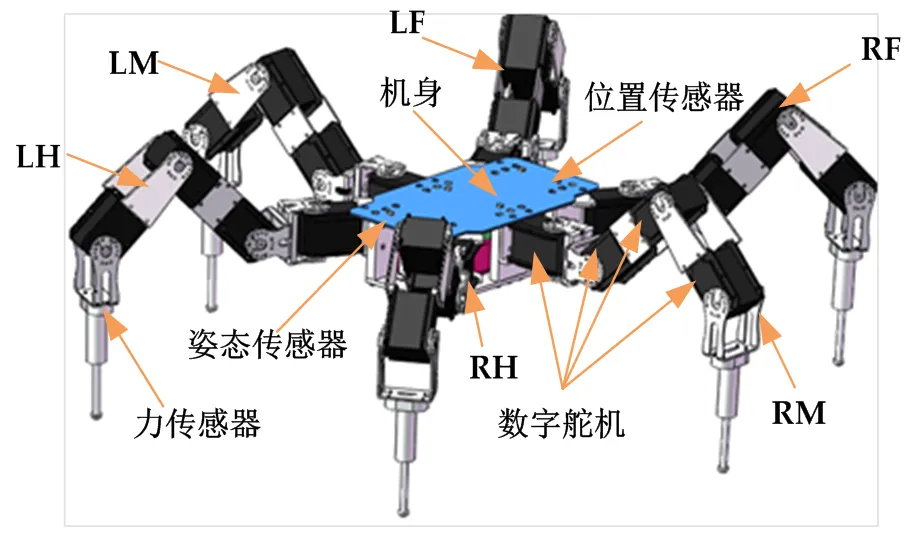
图1 六足机器人平台
图1所示为六足仿生跳蛛机器人的模型,其中LF代表左侧前腿,LM代表左侧中间腿,LH代表左侧后腿,RF代表右侧前腿,RM代表右侧中间腿,RH代表右侧后腿,同时左前腿、左后腿、右前腿和右后腿四条腿与机身轴线夹角均为60°。每单腿腿4个转动关节,分为髋关节、股骨—髌骨关节、胫骨—跖骨关节、跖骨—睑骨关节。这样的腿部设计一方面提高了机器人的运动精度和运动效率,另一方面也易于实现仿生机器人在三维空间平移和旋转时的稳定性。
单腿的关节转动通过数字舵机实现,每个关节对应一个数字舵机。除此之外,机器人安装有力传感器、姿态传感器和位置传感器等。数字舵机控制每个关节转过相应的角度,实现机器人的运动。力传感器[3]安装在腿部,用于测量足端与地面接触力以确保腿部所受到的接触力在机器人的承载范围之内,同时也可以用作力控制的反馈器,将足端接触力反馈至关节处,调整输出力矩的大小,从而实现机器人的力矩控制;
姿态传感器[4]和位置传感器安装在机身上,姿态传感器用于测量机器人实时的姿态角。位置传感器用于测量机器人的实时位置[5]。
机器人的运动学分析是检验机器人结构设计是否合理的有效手段。将单腿模型抽象成由若干连杆组成,运动学分析的方法是通过相关的设计数据和公式,找出在基坐标系下各个连杆之间的位置关系和角度关系,而目前实现运动学分析最常用的手段就是D-H模型[6]分析法。如图2所示为单腿四关节的D-H模型,髋关节处建立坐标系{O1},股骨-髌骨关节处建立坐标系{O2},胫骨-跖骨关节处建立坐标系{O3},跖骨-睑骨关节处建立坐标系{O4};
为了方便计算,将基坐标系{O0}建立在髋关节处且与坐标系{O1}重合,单腿模型各连杆长度分别为L2、L3、L4。按照上述参数建立单腿的D-H模型,得到D-H参数如表1所示。

图2 D-H模型

表1 运动学模型参数
机器人运动方程的表示问题,即正运动学;
根据坐标系变换的链式法则,可以得到坐标系{-1}到{}的变换矩阵,即:
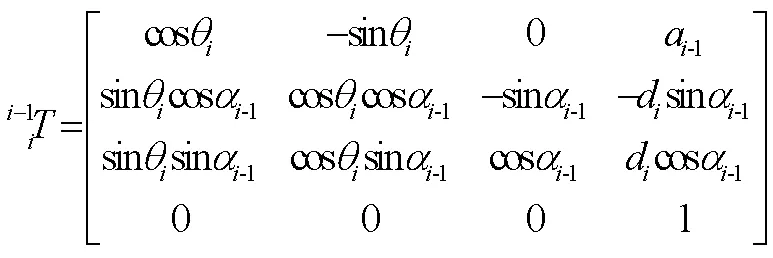
将上述D-H参数代入式(1)中,即可得到坐标系{-1}到坐标系{}变换矩阵,即:
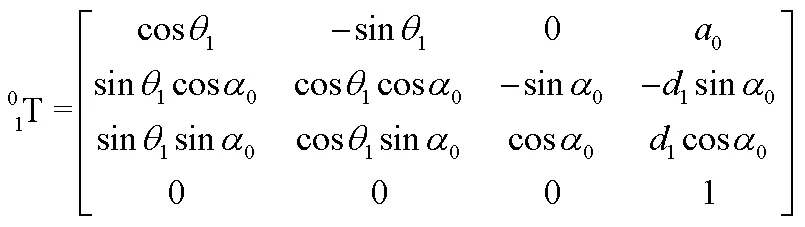
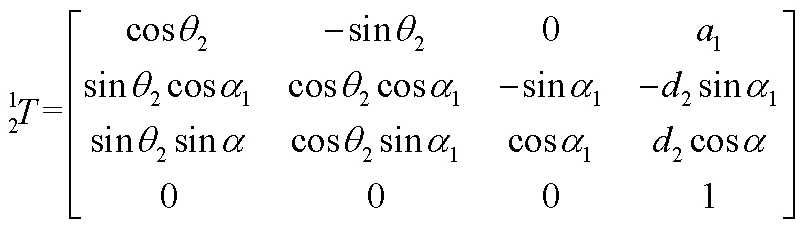


将各个相邻的坐标系变换矩阵依次相乘,即可得到足端在基坐标系{O0}下的位置矢量,即:


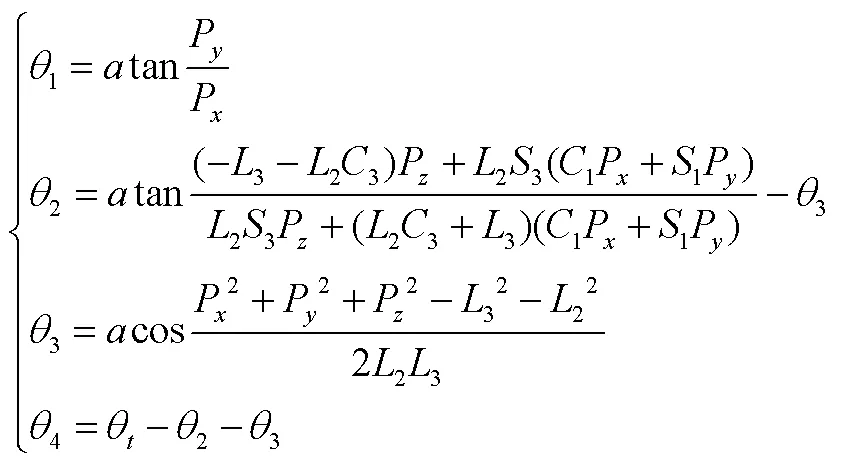
机器人运动方程的求解问题,即逆运动学;
在已知机器人连杆的几何参数,给定机器人末端执行器(足端)相对于基座标系的位置矢量,求机器人能够达到预期位置时的关节变量。本文中的逆运动学求解就是在已知足端相对于基座标系的位置矢量的前提下,求单腿的四个关节转角。
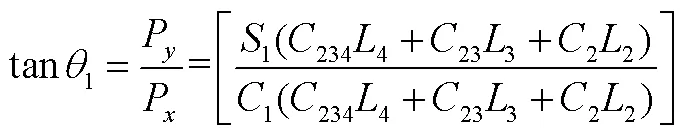
3.1 求θ1(解析法)


3.2 求θ3(解析法)
令矩阵方程(6)两端的元素(1,4)和(3,4)分别对应相等,即得到两个方程:

式(8)与式(11)的平方和为:



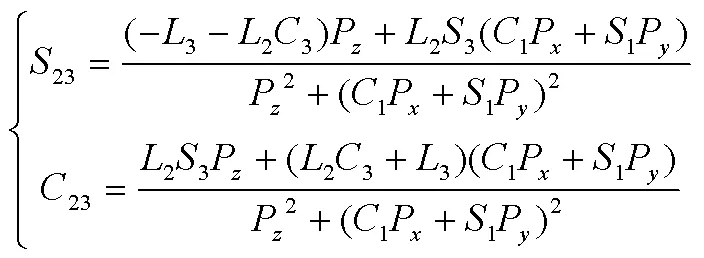
3.3 求θ2(解析法)

联立求解得S23和C23:


3.4 求θ4(几何法)


图3 腿部简化模型
将机械腿投影在X-Z平面坐标系下,可得到机械腿的简化模型,如图3所示是连杆机构简化模型,其中O点表示股骨—髌骨关节,A点表示胫骨—跖骨关节,B点表示跖骨—睑骨关节,为方便计算,我们将髋关节和股骨—髌骨关节重合在O点。由连杆机构各连杆之间的几何关系,可得:
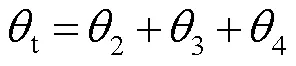
综上所述,可得:
逆运动学公式可以用于机器人足端轨迹的规划,在已知足端路径的情况下可以通过逆运动学公式求出相对应的关节转角,再由关节驱动相对应角度从而实现机器人移动。
4.1 CPG控制方法实现
仿生跳蛛机器人的CPG控制模块主要包括Hopf谐波器信号产生模块、轨迹发生器产生模块和信号耦合模块三部分。Hopf谐波器产生非线性的周期性信号,作为各个关节的时间基准,作为时间参考驱动机器人关节转动;
轨迹发生器负责对足端轨迹进行规划并且通过逆运动学得出各个关节的对应转角公式;
通过信号耦合模块可以将周期性信号和关节转角公式相互关联,即以CPG信号作为时间基准驱动各个关节转动,从而产生具有节律运动的转角信号,驱动仿生跳蛛机器人按照规划的轨迹运动。
轨迹发生器模块是CPG驱动系统的重要组成部分,该模块负责规划机器人的足端的轨迹并且通过逆运动学将预期轨迹转换为相应的关节转角公式。本实验中在已知足端相对于基坐标系的初始位置、初始速度、初始加速度和期望点的位置、速度、加速度的前提下,可以按照四次样条曲线对足端进行轨迹规划,摆动过程足端位置为:

轨迹发生器中已经完成了对机器人足端的轨迹规划,但这只是一个周期的足端轨迹,机器人运动一个周期就会停止,不具有连续性。所以为了使仿生跳蛛完成连续运动,必须将规划的期望路径的关节转角公式和具有周期的CPG信号耦合到一起,这样就能实现机器人的连续运动,如图4所示。

图4 信号耦合示意

图5 质心轨迹
图5在Matlab软件中通过五次多项式插值算法和虚拟质心算法规划出仿生跳蛛直线行走时质心的期望(红色)和实际运动(蓝色)轨迹。机器人采用三角步态,行走时三条腿为摆动相,另外三条腿为支撑相,机身通过不断摆动完成预期运动。从图中我们可以得出其质心轨迹并不是理想的直线,而是来回摆动的曲线,这样的运动方式一方面降低运动平稳性,另一方面对机器人本身结构稳定性也存在一定的挑战,更是反映出控制方式的不足。
4.2 Matlab-Adams的仿真分析
将Solidworks已建立的虚拟样机模型导入Adams中,在Adams软件中,为了尽量简化模型,对单腿模型上的零件进行布尔操作,使之成为一个整体。同时根据仿生跳蛛的运动特点,对三维模型的各个关节添加相应的约束。
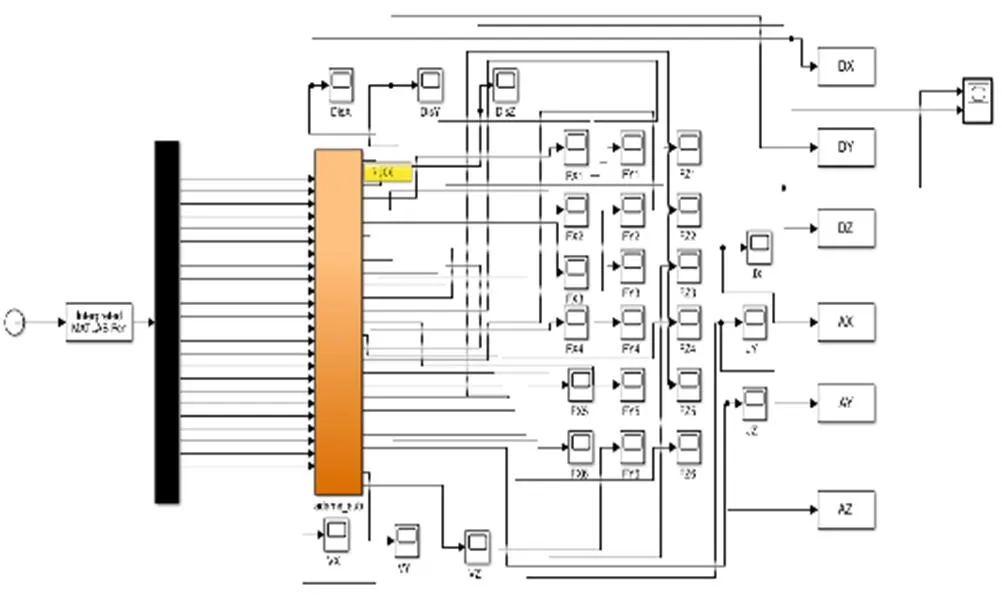
图6 机器人位置控制Simulink模型
本文将仿生跳蛛机器人的二十四个关节位置曲线(位置控制)作为控制程序的输出,同时作为仿生跳蛛虚拟样机仿真平台控制系统的输入信号,输入到机器人Adams模型中,驱动仿生跳蛛机器人的各个关节转动,从而实现机器人按照预定轨迹的移动,其控制框架如图6所示。
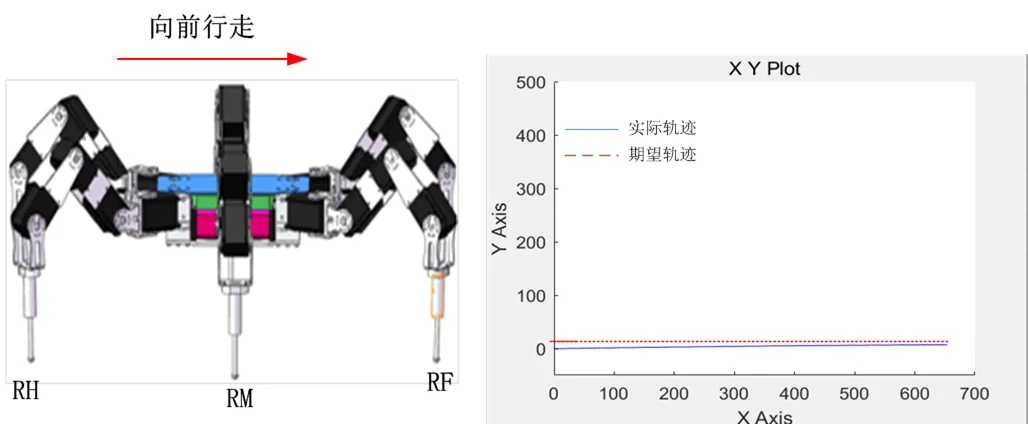
图7 机器人轨迹示意图
针对图5中控制方法的不足,笔者采用全向运动算法控制跳蛛机器人,并在通过Matlab和Adams进行算法仿真。图7所示是仿生跳蛛机器人在Adams和Matlab的联合虚拟仿真平台上直线行走的轨迹。图中蓝线是仿生跳蛛的预期轨迹,而红线则是仿生跳蛛机器人的实际轨迹。通过上述两条直线的对比,可知仿生跳蛛的实际轨迹并非预期的直轨迹,而是存在一定的轨迹误差。
本文首先根据实际运用需求确定了机器人腿部的总体结构和大致尺寸,利用Solidworks对机器人腿部进行三维建模。之后,利用D-H模型法对其进行正逆运动学分析,求解机构的正逆运动学方程。最后通过Matlab和Adams联合仿真验证了基于CPG控制的机器人直线运动,得出机器人足端轨迹和质心轨迹图,验证了方法的可靠性和稳定性。此外,本文设计的六足机器人体积较大,虽然整机采用轻量化,但是体积问题使其不能进入狭小空间执行危险任务,从而进一步限制其应用范围,因此,仿生机器人的微型化是后续进行研究的新问题。
[1] 于欣龙. 六足仿蜘蛛机器人样机研制及步行机理研究[D]. 哈尔滨: 哈尔滨工程大学,2013.
[2] HYUN D J, SEOK S, LEE J, et al. High speed trot-running: Implementation of a hierarchical controller using proprioceptive impedance control on the MIT Cheetah[J]. International Journal of Robotics Research, 2014, 33(11): 1417-1445.
[3] 郝欣伟. 仿生机器蟹步行足协调运动控制系统研究[D].哈尔滨: 哈尔滨工程大学,2007.
[4] 雷震宇. 六足机器人行走步态的协调控制研究[D]. 西安: 西安工业大学,2018.
[5] 黄再辉. 基于CPG的六足机器人运动控制研究[D]. 呼和浩特: 内蒙古工业大学,2016.
[6] 韩青,叶选林,曹飞祥. 基于CPG的四足机器人全方位行走控制研究[J]. 机械传动,2014(5): 36-41.
Research on Motion Control of Multi-Legged Robot
According to the method of biological motion, this paper studies the control method of the bionic hexapod robot. Firstly, the mechanical body design of the hexapod robot imitating jumping spider is completed through Solidworks, and the parameters of the robot body are determined; then according to the leg structure model of the bionic jumping spider, the corresponding D-H mathematical model is established. By analyzing the motion mode and mechanism of the jumping spider and using the relevant mathematical knowledge, the forward and inverse kinematics of the single leg of the bionic jumping spider is solved. Finally, a virtual prototype simulation platform based on MATLAB-Adams is established to complete the simulation analysis of robot linear motion based on position control.
hexapod robot; D-H model; kinematics
TP242
A
1008-1151(2022)11-0026-04
2022-09-17
秦海鹏(1996-),男,长安大学工程机械学院在读硕士研究生,研究方向为机器人运动控制。
猜你喜欢 单腿运动学坐标系 独立坐标系椭球变换与坐标换算导航定位学报(2022年2期)2022-04-11基于重心动力学及虚拟模型的单腿平台运动控制*火力与指挥控制(2021年6期)2021-08-06基于MATLAB的6R机器人逆运动学求解分析河北省科学院学报(2020年1期)2020-05-25工业机器人在MATLAB-Robotics中的运动学分析重型机械(2019年3期)2019-08-27基于D-H法的5-DOF串并联机床运动学分析制造技术与机床(2018年11期)2018-11-23单腿蹦还是齐步走——浅谈直销产品导向和事业导向知识经济·中国直销(2018年6期)2018-06-29解密坐标系中的平移变换中学生数理化·七年级数学人教版(2018年4期)2018-06-28坐标系背后的故事数学大世界(2018年1期)2018-04-12火烈鸟单腿站立更“节能”发明与创新·大科技(2017年7期)2017-07-17基于运动学原理的LBI解模糊算法海军航空大学学报(2015年1期)2015-11-11栏目最新:
- 2024年度在理论学习中心组关于群众路线...2024-01-16
- 在退役军人事务工作领导小组会议上讲话...2024-01-15
- 中秋国庆队伍教育管理工作动员部署会议...2024-01-15
- 2024年度区委书记在文旅农康融合发展大...2024-01-14
- 医院纪检监察干部队伍教育整顿个人党性...2024-01-14
- 教师演讲稿:牢记育人使命,涵养高尚师德...2024-01-13
- 2024年组织部长在市委理论学习中心组专...2024-01-13
- 2024年区人民法院案件质量评查办法(2篇...2024-01-13
- 2024年区长在指导某街道干部作风建设动...2024-01-11
- 在公司成立周年大会上讲话(3篇)(完整...2024-01-10
相关文章: