基于时变底盘构型的混动车辆能量管理研究*
李军求,刘吉威,朱超峰
(北京理工大学电动车辆实验室,北京 100080)
混合动力车辆能量管理问题(EMP)有着高度非线性、非凸性等复杂特征,且对计算量以及时间成本有着严格要求,如何实时优化发动机、动力电池与电机之间功率分配并能实时工程应用,一直是混合动力车辆节能控制研究重点。
在已有研究中,EMP通常可分为两大类:基于规则的控制方法和基于优化的控制方法[1-4]。基于规则的控制方法通常依据相关工程经验与试验数据对门限值进行设定,进而完成模式划分和电机转矩分配,控制实时性好,在工业应用方面较为广泛[5-7],如丰田-普锐斯和比亚迪-秦等均采用该方法[8]。基于优化的控制方法,是指确定目标函数和约束条件之后,对制定的控制策略采用优化算法搜索最优或次优解[9-11]。在线优化控制研究中,等效燃油消耗最小策略(ECMS)计算速度快,实时性好。Rezaei等[12]提出了一种自适应等效燃油消耗最小策略(AECMS),通过对车速进行预测并在预测时域内实现最优控制,使该方法便于实时应用。
近年来使用模型预测控制(MPC)来实现在线控制,基于训练好的模型来进行未来状态的预测,并将其应用于有限时域内目标泛函的滚动优化[13-15]。张洁丽[16]选定了基于多步马尔科夫模型的预测方法进行车速与加速度预测,并将模型预测控制与动态规划相结合,进行了优化求解以减小计算量。Sun等[17]提出了一种监督型预测能量管理的方法,通过对模型进行简化在上层策略中对SOC进行规划,以保证控制结果的全局最优性。上述基于MPC控制的能量管理,一方面能够通过对未来工况的信息进行预测,从而解决工况局限性问题,另一方面能够通过在控制时域内滚动优化,来实现近似最优,是一种非常具有应用前景的控制方法[18]。
但是,针对混合动力分布式驱动重型车辆,如何解决其工况复杂、底盘动力部件多、构型与驱动模式存在多重组合、难以实现能量高效管理的问题,目前研究尚未深入,有待于进一步探索。
本文中针对混合动力分布式驱动重型车辆,基于实车试验数据提出着眼全局工况的RULE_LSTM算法获取能耗最优时变构型;
基于交通流与径向基神经网络获取长短尺度工况信息用于后续策略输入,完成在线构型匹配与SOC参考轨迹规划;
分别从基于时变构型的控制变量优化、成本函数与约束条件强化、SOC参考轨迹引导3方面优化MPC算法实现引导型多APU预测能量管理策略研究。整体算法框架如图1所示。

图1 整体算法框架
1.1 整车布置与底盘构型选择
本文对象是某五轴分布式驱动重型车辆,采用串联混合动力模式,动力部件布置如图2所示。该车使用动力锂电池组作为驱动能源部件,双发动机发电机组作为辅助动力单元(APU),经由一体化电源平台整合功率后通过电机控制器(MCU)控制10个轮边永磁同步电机,实现分别独立驱动。考虑到该车在不同工况下的功率需求不同,以及电机效率对总需求功率求解的影响,选择单APU+三轴驱动(构型1)、单APU+四轴驱动(构型2)、双APU+三轴驱动(构型3)作为待匹配底盘构型。

图2 整车能源部件布置
1.2 整车动力学与关键部件建模
1.2.1 整车动力学建模
考虑对象车辆行驶过程中的纵向动力学特性,忽略车辆的横向动力学和垂向动力学特性,对路面滑移和车辆转向特性需求不做考虑。车辆行驶过程受到滚动阻力、坡度阻力、空气阻力和加速阻力,其动力学方程为
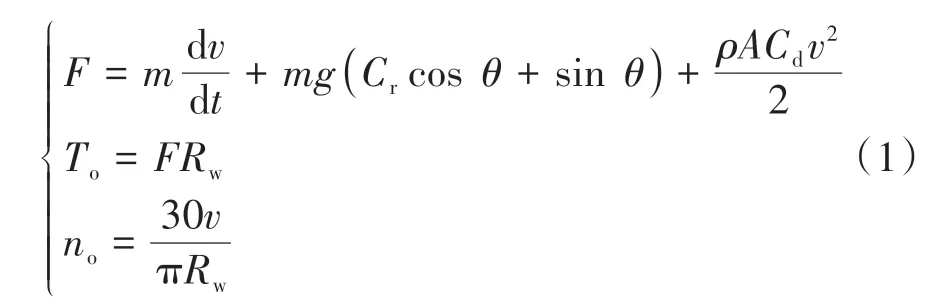
式中:F是车辆驱动力;
m是整车质量;
v是当前时刻车速;
g是当前地区的重力加速度,取9.81 m/s2;
Cr是道路滚动阻力系数;
θ是当前道路坡度角;
φ=(Crcosθ+sinθ)是道路总阻力系数;
ρ是空气密度常数;
A是车辆迎风面积;
Cd是空气阻力系数;
Rw是车轮滚动半径;
no是不考虑滑转滑移的车轮理论转速;
To是车轮所需驱动转矩。具体参数见表1。
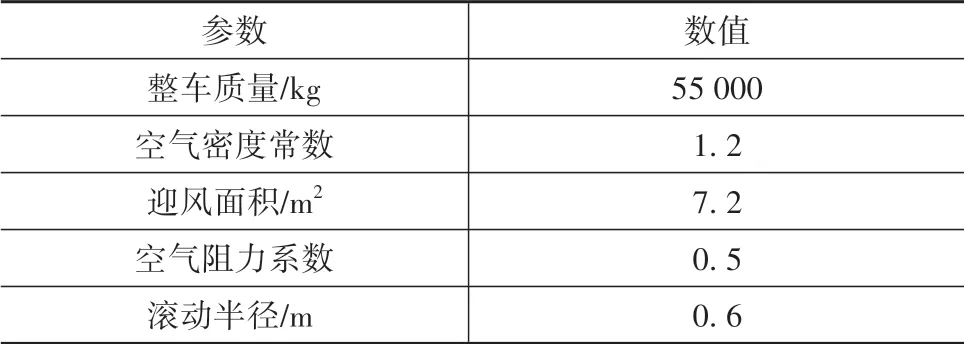
表1 整车与动力系统参数
1.2.2 发动机发电机组建模
发动机的燃油消耗是整车主要的能耗损失,其特性也影响整车性能。根据台架试验得到发动机外特性曲线、最佳燃油消耗曲线(BSFC)和发动机在工作区域的燃油消耗率。发动机的油耗计算公式为

式中:me是发动机工作过程的燃油消耗量;
ne是发动机转速;
Te是发动机转矩;
ṁe(ne,Te)是燃油消耗率;
ts是发动机工作起始时间;
te是发动机工作停止时间。
该车发动机与发电机之间经由缓振联轴器连接,动力传递过程存在的机械损失可忽略,根据台架试验得到发电机的效率map图,发电机模型可以简化为

式中:ng是发电机输入轴转速;
Tg是发电机输入轴转矩;
Pg是发电机输出到直流母线的电功率;
ηg是发电机效率。
1.2.3 驱动电机模型
根据电机外特性和效率标定试验得到的试验数据绘制map图,采用实验模型,实时性强,满足车辆建模需求,见式(4)。
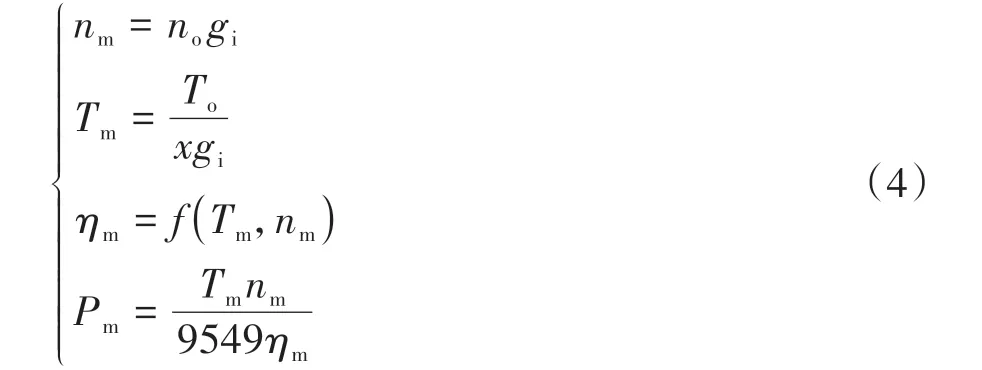
式中:gi是轮边减速器减速比;
nm是驱动电机转速;
Tm是驱动电机转矩;
x是不同底盘构型使用的驱动电机数目;
f(Tm,nm)是查表函数;
ηm是驱动电机效率;
Pm是驱动电机输入功率。
1.2.4 动力锂电池组建模
根据小电流充放电试验得到开路电压随SOC变化的SOC-OCV曲线,根据动力电池脉冲试验得到电池组内阻随SOC变化的SOC-R曲线。忽略车辆行驶过程中电池组内部温度的影响,采用内阻模型对动力锂电池组建模,见式(5)。

式中:Pb是电池组输出功率;
Ib是电池组充放电电流;
vocv是插值得到的当前时刻开路电压;
r是插值得到的当前时刻电池组内阻;
soc是当前时刻SOC值;
soc0是上一时刻的SOC值;
Q是电池组容量。
2.1 历史工况提取
本文中研究车辆曾在不同地区进行跑车试验,选择包含多个典型试验场景(城市、高速、颠簸道路爬坡)的工况作为能量管理策略验证的输入,跑车试验图片如图3所示。离线重放CAN报文信息,经由隆贝格观测器完成道路坡度估计,得到多段相同路线下的全局工况信息,包含车速和道路总阻力系数φ=(Crcosθ+sinθ),作为后续算法的输入,某段全局工况信息如图4所示。

图3 跑车试验图片
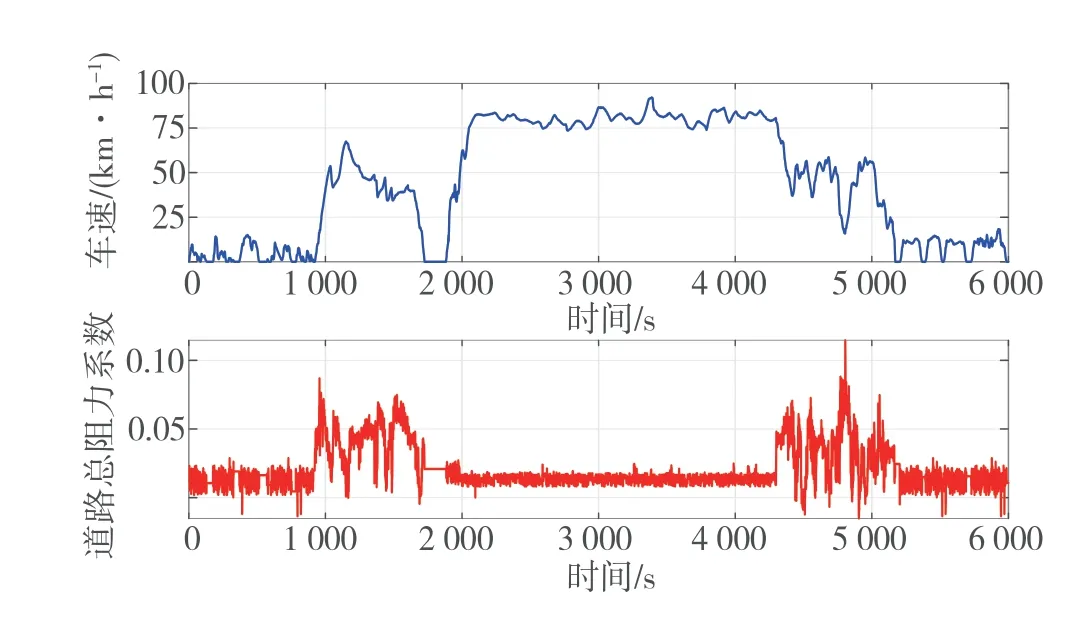
图4 全局工况信息
2.2 LSTM网络建模
为同时满足底盘构型切换延迟时间和算法求解的计算负担,选定300 s作为提取多段典型样本工况的窗口尺度,对多段全局工况进行片段划分。本文选择平均车速、最高车速和平均道路总阻力系数作为样本工况的特征:

采用动态规划算法,对已提取的200段样本工况信息以能耗最小为目标,对象车辆采用串联构型,电池SOC设定为维持型,起始终值SOC差值较小,为简化计算,忽略了电池的电能消耗,因此目标函数设定为燃油消耗成本。进行离线全局最优底盘构型匹配。成本函数与约束条件如下:
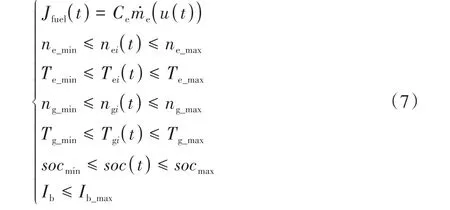
式中:i=1,2;
Jfuel(t)是采样点瞬时燃油消耗成本;
Ce是转换系数,将成本函数尺度转换为价值(元);
u(t)是控制变量,选取为发动机转速、转矩;
ne_min、ne_max分别是发动机转速约束上下限;
Te_min、Te_max分别是发动机转矩约束上下限;
发电机转速转矩约束范围ng_min、ng_max、Tg_min、Tg_max的取值和发动机相同;
socmin、socmax是动力电池组行驶过程中荷电状态(soc(t))的约束范围,本文研究车辆采用串联架构,电池SOC设置为维持型,波动上下限范围狭小,设定为0.6和0.8;
Ib_max是最大充放电电流。
以3段典型场景下样本工况为例,对应的DP算法求解结果见表2。
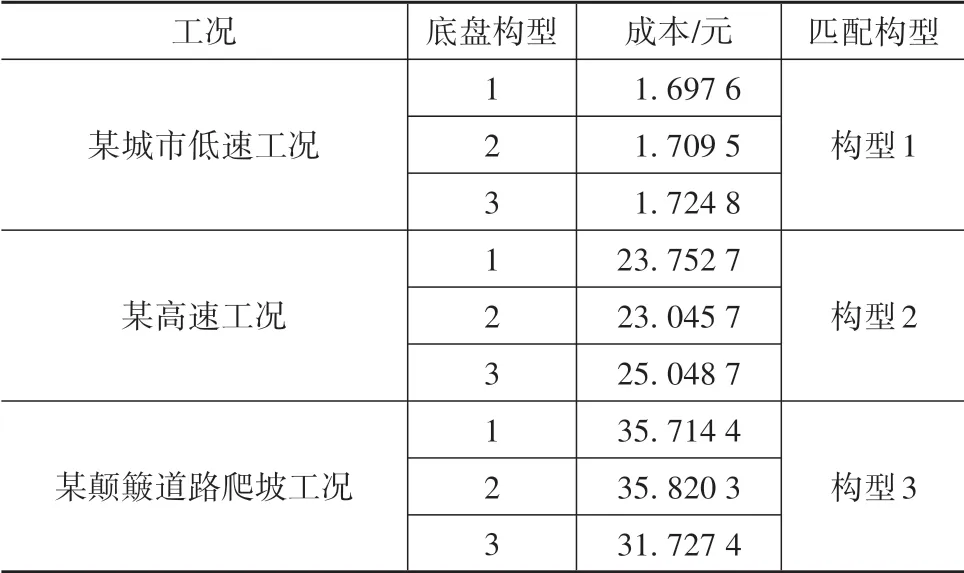
表2 DP求解结果
表中“匹配构型”指不同工况下选择的底盘构型。根据上述结果对200段工况片段添加标签值,也就是最佳底盘构型。对样本工况数据进行归一化处理:

式中:x是待处理变量;
xˉ是变量均值;
std是标准差函数。
按70∶15∶15的比例划分为训练集、验证集和测试集,作为LSTM网络的输入数据[19]。序列输入层的维度是3,LSTM隐藏层的网格数是100,输出层的维度是3,配置分类层,损失函数用交叉熵函数。损失函数和分类准确率如图5所示。

图5 训练迭代结果
准确率最终迭代到97.07%,损失函数最终迭代到0.001 2。由未使用的30个样本工况验证网络,并与DP求解的最优底盘构型对比,识别准确率为100%。因此可以实现对输入工况的正确选择最优构型。
车辆在行驶过程中缺乏全局工况先验,需要进行工况信息预测。本文中采用多尺度工况信息预测,即从交通流获取长尺度工况信息用以匹配能耗最优底盘构型;
同时采用RBF神经网络进行短尺度车速预测用以作为后续能量管理算法的输入工况实现功率分配。
3.1 长尺度工况信息预测
底盘构型切换需要长时间尺度工况信息,本文采用交通流仿真模拟智能交通系统技术系统(ITS)获取长期工况信息。基于全局工况对应路线,经由VISSIM软件配置车道、车辆、车流量信息,同时配置冲突区域等路径决策,相隔1 km设定记录数据节点,最终得到包含平均车速和道路总阻力系数的全局平均工况,如图6所示。

图6 全局工况信息
由于LSTM择优网络针对3类典型工况构建,在工况切换下存在构型识别精度低的问题,因此本文结合LSTM和规则判断完成长尺度工况预测点更新和构型判断,算法伪代码见表3。

表3 RULE_LSTM算法伪代码
以全局工况信息为例,采用动态规划算法按照固定300 s尺度对工况进行离线能耗最优构型验证,其与LSTM算法与RULE_LSTM算法识别的底盘构型结果(以车速信息为例)如图7所示。

图7 不同算法底盘构型择优结果
相比于LSTM神经网络,在1 500-1 800 s的工况切换阶段,采用RULE_LSTM算法构型选择结果动态规划标注构型相同;
在4 200-4 500 s工况切换阶段,RULE_LSTM算法的构型选择与动态规划标注构型有差异。RULE_LSTM算法在全局工况下,构型识别准确率为95%,相比于LSTM神经网络全局85%的构型择优准确率,提高了11.76%,验证了其在构型选择上(尤其是工况切换阶段)提高准确率的可行性。
LSTM网络与RULE_LSTM算法更新的节点和对应构型见表4。

表4 交通流信息更新节点对比
RULE_LSTM算法构型的更新节点为22个,比固定LSTM多两个,但底盘构型切换4次,相比固定LSTM(切换6次),构型切换频繁程度降低了33.3%,实现以算法预测更新、节点频繁程度作为代价,减少了底盘构型频繁切换带来的动态燃油消耗和机械寿命损失。
由RULE_LSTM算法求取的最优构型,与长尺度工况信息一起作为DP算法输入,以能耗最优为目标获取的SOC参考轨迹,在后续能量管理算法中为SOC提供时变约束,完成引导。
3.2 短尺度工况信息预测
由交通流获取的长期工况信息,时域跨度大,信息更迭慢,难以作为能量管理策略实时输入工况,因此本文采用RBF神经网络来进行短尺度车速信息进行预测[20],如图8所示。

图8 径向基神经网络预测车速示意图
网络训练与验证的输入信息比原始工况信息(等时域历史车速序列)增加了由主成分分析选取的工况特征:平均车速、最大车速、平均加速度、最大加速度。选取某600 s高速工况片段作为网络验证输入,选择不同尺度的预测时域Hp=5,10,15 s,预测结果如图9所示。

图9 车速预测结果
采用均方根误差(RSME)反映车速预测值的偏离程度,作为不同预测时域下车速预测的准确性评价指标:

式中:k是输入工况长度;
RMSE是整段工况的均方根误差;
RMSE(i)是工况内每个采样点(1 s)的均方根误差;
Hp是预测时域;
Vpre(i+j)是i时刻、时间向后j的预测车速;
Vtrue(i+j)是i时刻、时间向后j的真实车速。不同预测时域对应的均方根误差如表5所示。

表5 不同预测时域均方根误差
兼顾MPC算法对预测时域长度的要求以及短期车速预测的精度,选择10 s作为预测时域,与无特征预测模型的均方根误差对比见表6。

表6 不同网络车速预测均方根误差
可见增加主成分分析得到的工况特征训练出的径向基神经网络,均方根误差降低了6.28%,更适合作为短时间尺度工况预测模型。
为解决对象车辆底盘部件多、能量管理难的问题,本文中采用MPC算法,从控制变量优化、成本函数与约束条件优化、电池SOC参考轨迹引导3方面完成改进,最终提高燃油经济性。
4.1 状态动作空间
算法采用能耗最优时变构型,依据构型对控制变量降维,实现计算简化。当采用单APU构型时,控制变量为发动机转速和转矩;
当采用双APU构型时,引入发动机最佳燃油消耗曲线预设区间,控制变量选择为两发动机转速。具体公式如下。
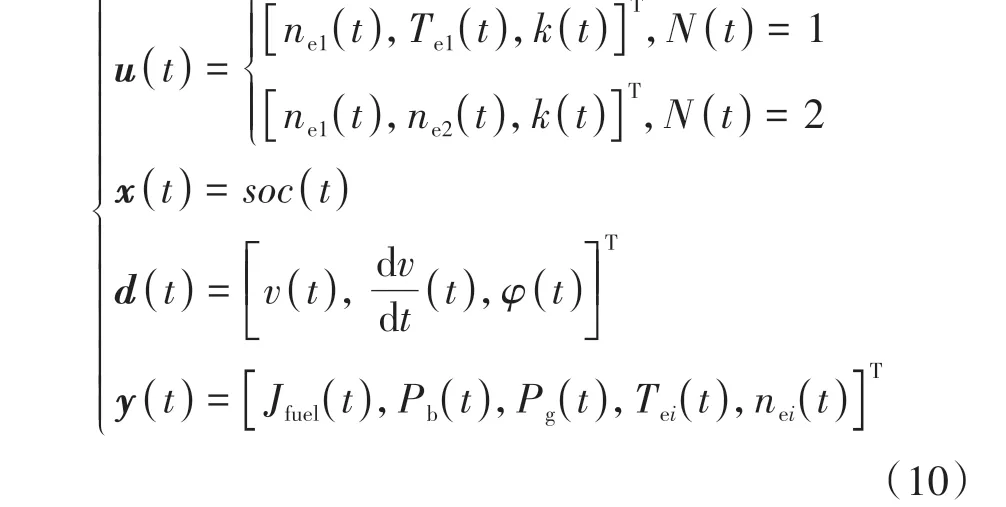
式中:i=1,2;
u(t)是控制变量;
N(t)、k(t)是不同底盘构型中发动机和电机工作点序号;
x(t)是状态变量,选择电池SOC;
d(t)是系统扰动变量,选择车速、加速度和道路总阻力系数;
y(t)是求解输出变量,包含成本、电池功率、发电机功率、双发动机转速与转矩。
4.2 成本函数
能量管理问题求解过程需要定义成本函数Jfuel(t),考虑到底盘构型切换与行驶过程中的发动机转速变化会带来额外的动态燃油消耗,本文成本函数包含3部分,分别是发动机静态油耗成本、动态消耗(底盘构型切换和行驶过程中的发动机转速变化会带来额外的动态燃油消耗)和SOC溢出惩罚消耗(SOC超过阈值所致),成本统一尺度为价格(元),具体计算公式如下。
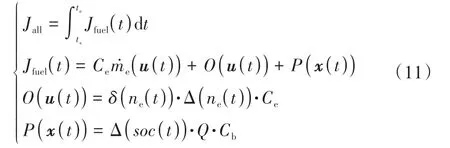
式中:Jall是工况全程燃油消耗;
Jfuel(t)是采样点瞬时燃油消耗;
O(u(t))是发动机动态燃油消耗,与发动机转速变化∆(ne(t))和时变惩罚函数δ(ne(t))相关;
P(x(t))是SOC溢出惩罚;
Cb是转换系数。
4.3 约束条件与求解配置
能量管理算法求解过程需要满足预设约束条件,本文研究的车辆采用串联式构型,动力电池为维持型,求解过程的约束条件为
式中:i=1,2;
ne_min、ne_max是发动机转速约束上下限;
∆ne_min、∆ne_max是发动机转速变化率约束上下限;
Te_min、Te_max是发动机转矩约束上下限;
发电机转速转矩约束范围ng_min、ng_max、Tg_min、Tg_max取值和发动机相同;
socmin、socmax是动力电池组行驶过程中荷电状态(soc(t))的约束范围,本文对象车辆采用串联架构,电池SOC设置为维持型,波动上下限范围狭小,设定为[0.6,0.8];
socT_min、socT_max分别是动力电池组终止时刻荷电状态(soc(T))的约束范围,设定为交通流获取的长期工况经由DP算法求得的SOC参考轨迹;
Ib_max是最大充放电电流。
求解配置方面,为了平衡收敛情况与计算时长,将状态量网格数目设定为40,控制量网格数目设定为60,为了防止约束冲淡,将惩罚系数设定为104。
4.4 仿真结果验证
4.4.1 采用SOC参考轨迹结果对比
算法输入工况为第3节中构建的多尺度工况,在相同输入工况下,采用相同成本函数与约束条件(增加转速变化率约束)、时变能耗最优构型时,采用固定终值SOC约束、SOC参考轨迹引导、动态规划算法的SOC轨迹对比如图10所示。

图10 不同算法SOC轨迹比较
采用固定终值SOC约束区间时,受到预测时域限制,SOC轨迹更稳定,终值为0.696。采用SOC参考轨迹引导时,SOC变化趋势更趋向DP算法,SOC变化大,但终值为0.682,在理想约束范围内。同时一定程度解除了预测时域的限制,需求功率变化剧烈时电池功率强跟随进行功率补充,符合串联构型的布置理念,弥补APU动态响应延迟的缺点,采用局部SOC下降作为代价实现功率更优分配,优于SOC固定约束区间。
SOC固定约束区间和SOC参考轨迹时变的成本对比如图11所示。

图11 不同算法成本比较
采用SOC固定区间约束时,全局成本为428.166 1元;
用SOC参考轨迹时变区间约束时全局成本为419.359 8元,全局成本降低了2.06%。
4.4.2 有无转速变化率约束结果对比
相同输入工况下,采用相同成本函数、时变最优构型及采用SOC参考轨迹时,是否增加发动机转速变化率约束的成本对比如图12所示。无转速变化率约束下对象车辆全局成本为436.595 7元,增加转速变化率约束后的成本为419.359 8元,全局成本降低了3.95%。

图12 转速变化率约束成本对比
增加转速变化率约束后的发动机工作点分布对比如图13所示。可知约束条件变更前后发动机工作点都位于最佳燃油经济曲线附近。增加转速变化率约束,发动机输出功率需求较低时,转速转矩变化小,符合约束条件要求,工作点分布变化较小;
发动机输出功率需求较高时,转速转矩变化大,受到约束条件钳制,发动机工作点在1 600-2 200 r/min段增加,2 200-2 800 r/min段减少,发动机短期内工作点跨转速区间的大范围阶跃跳变减少,转速变化在合理变化范围内,工作点集中于燃油消耗较低区域的BSFC曲线附近,有助于改善燃油经济性。

图13 发动机工作点分布对比
4.4.3 不同构型结果对比
相同输入工况下采用相同成本函数、约束条件和SOC参考轨迹时,采用不同底盘构型对应的成本对比如图14所示。采用能耗最优时变底盘构型成本为419.359 8元,采用固定底盘构型1、2、3的成本分别为462.910 7、469.063 0、426.850 3元,即采用控制变量优化后全局成本相对固定构型分别降低了9.41%、10.60%、1.75%。

图14 不同底盘构型成本对比
需求功率变化时,采用时变能耗最优底盘构型可以避免电池组输出功率激烈波动造成的寿命损失。图15显示了不同底盘构型下的电池组功率输出。采用时变构型时,电池组功率绝对值均值较采用固定构型分别降低了69.85%、69.42%、34.12%,方差分别降低了84.02%、83.96%、37.99%。可知相比于固定底盘构型,采用时变构型时电池组功率波动频率较缓,振幅更小。

图15 不同底盘构型全局电池组功率对比
4.4.4 算法有效性分析
为验证本文提出算法的有效性,在相同输入工况下,选取动态规划算法作为最优上限对标基准、基于规则控制的功率分级算法作为横向对比验证的下限基准。三者的SOC对比结果见图16。可知3类算法的SOC终值都收敛到预设区间,DP算法着眼于全局工况,动力电池组的充放电程度更深,更多地承担功率的补充和吸收;
规则分级算法缺少预测模型,SOC波动小,电池充放电程度较浅,发动机发电机组承担主要输出功率,保障SOC稳定。本文策略更加接近于动态规划SOC变化趋势,优于规则分级策略。
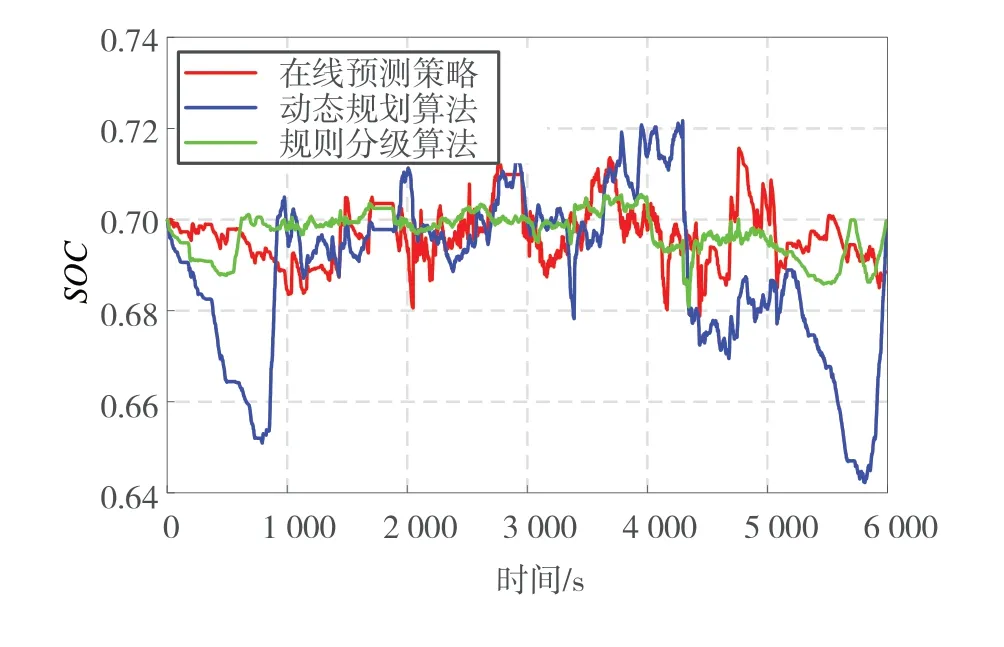
图16 3类算法SOC变化趋势对比
三者成本对比见图17,可知DP算法全局成本为415.549 5元,基于规则分级策略全局成本为438.946 2元,本文提出策略全局成本为419.359 8元,比规则功率分级策略成本降低了4.46%,但比动态规划最优上限成本高3.810 3元。可知该算法更加贴近全局最优的上限基准,有效提高了对象车辆燃油经济性。
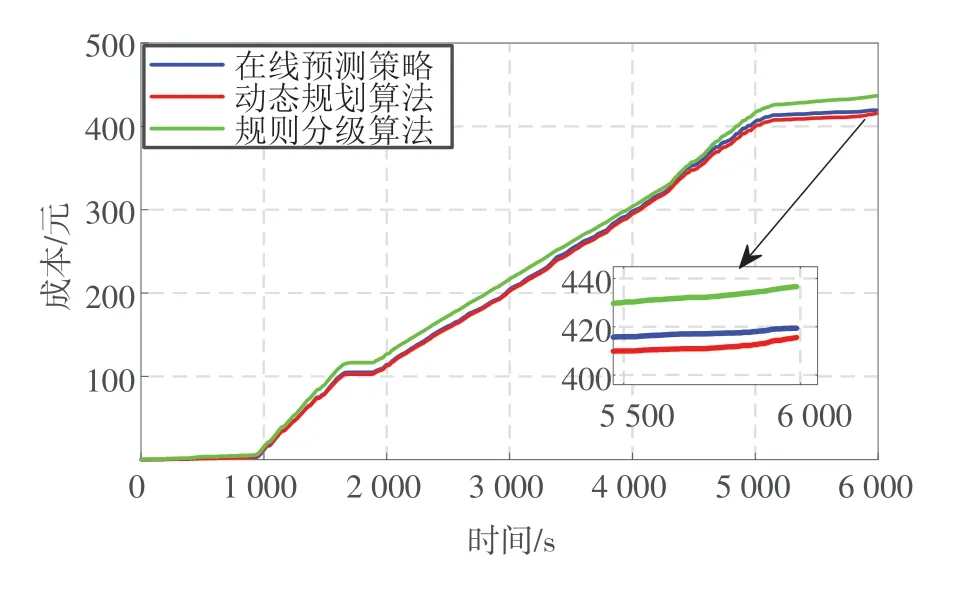
图17 3类算法全局成本对比
本文针对混合动力分布式驱动重型车辆底盘部件多、能量高效管理难的问题,基于多尺度工况信息预测完成时变能耗最优构型匹配,并针对MPC算法完成优化,实现燃油经济性的提高。
(1)根据实车试验数据提出RULE_LSTM算法用于在线能耗最优构型匹配,全局工况下构型准确率为95%,较LSTM神经网络提高11.76%,构型切换频繁程度降低了33.3%。
(2)基于交通流信息更新长尺度工况,完成能耗最优构型匹配及SOC参考轨迹规划;
短尺度工况预测结合原始工况信息与提取特征,采用10 s预测时域的RBF神经网络完成预测,供给MPC算法输入工况序列。
(3)算法接收短尺度工况序列、时变最优匹配构型与SOC参考轨迹,分别从时变构型优化、成本函数及约束条件、SOC参考轨迹引导3方面对算法进行优化,实现引导型多APU预测能量管理算法开发。仿真结果显示,较优化前全局成本分别降低了10.60%、3.95%、2.06%,比规则分级策略降低了4.46%。
猜你喜欢 时变构型底盘 场景高程对任意构型双基SAR成像的影响军民两用技术与产品(2022年1期)2022-06-01分子和离子立体构型的判定中学生数理化(高中版.高考理化)(2021年12期)2021-03-08列车动力学模型时变环境参数自适应辨识自动化学报(2019年12期)2020-01-19基于时变Copula的股票市场相关性分析智富时代(2017年4期)2017-04-27基于时变Copula的股票市场相关性分析智富时代(2017年4期)2017-04-27航天器受迫绕飞构型设计与控制北京航空航天大学学报(2017年10期)2017-04-20轿车底盘评价调校初探山东工业技术(2016年15期)2016-12-01依维柯New Daily底盘改装房车中国首秀专用汽车(2016年4期)2016-03-01基于MEP法的在役桥梁时变可靠度研究中国铁道科学(2015年4期)2015-06-21底盘测功机的发展及应用汽车维修与保养(2015年6期)2015-04-17栏目最新:
- 2024年度在理论学习中心组关于群众路线...2024-01-16
- 在退役军人事务工作领导小组会议上讲话...2024-01-15
- 中秋国庆队伍教育管理工作动员部署会议...2024-01-15
- 2024年度区委书记在文旅农康融合发展大...2024-01-14
- 医院纪检监察干部队伍教育整顿个人党性...2024-01-14
- 教师演讲稿:牢记育人使命,涵养高尚师德...2024-01-13
- 2024年组织部长在市委理论学习中心组专...2024-01-13
- 2024年区人民法院案件质量评查办法(2篇...2024-01-13
- 2024年区长在指导某街道干部作风建设动...2024-01-11
- 在公司成立周年大会上讲话(3篇)(完整...2024-01-10
相关文章: