3-SPS/SP并联机构的设计仿真分析及应用
符克伟,周毅钧,薛 兴
(安徽理工大学 机械工程学院,安徽 淮南 232001)
现代社会桶状物的商品有许多,以自来水水桶为例,绝大部分水桶的商标是用胶布或贴纸的方式粘上去,或是通过丝印的方式印上去。这些方式虽然也能达到预期的效果,但是相对来说效率较低,商标套准的精准度较差,不适用于大批量的加工应用。为解决上述问题,提出了一种3-SPS/SP并联机构,将3-SPS/SP并联机构应用于桶状物体表面商标喷涂装置。本文基于螺旋理论求解了3-SPS/SP并联机构的自由度,采用ADAMS软件进行运动学仿真,通过MATLAB软件获取该并联机构的可达工作空间,并以一个在桶状物体表面进行商标喷涂为实例,对该并联机构进行了仿真分析。
图1为3-SPS/SP并联机构三维模型,它主要由静平台、动平台以及4条支链组成,其中3条支链的结构相同,均为SPS,另一条支链结构为SP。四条支链的球副(S11、S21、S31、S41)分别与动平台相连,中间位置均由两条连杆组成移动副(P12、P22、P32、P42),上端是由3条SPS支链的另一个球副(S13、S23、S33)与静平台相连,SP支链则是由连杆的上端直接与静平台相连,整个机构的驱动副为连杆所组成的4个移动副。
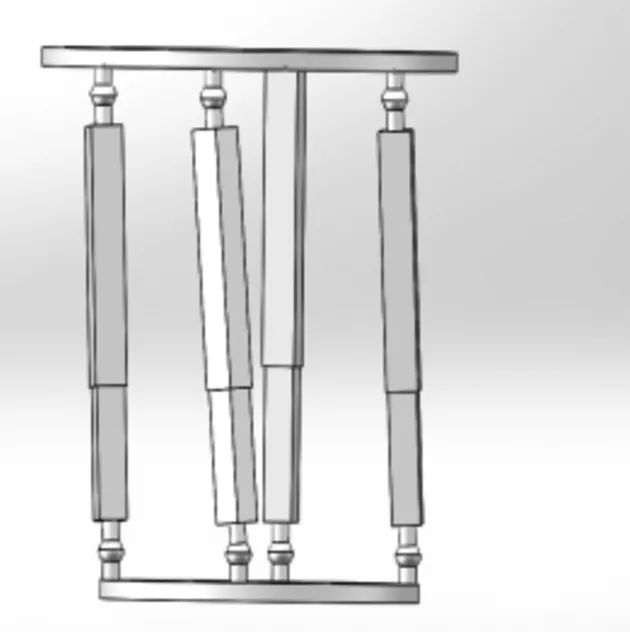
图1 3-SPS/SP并联机构三维模型
在动平台和静平台的中心分别创建动坐标系O-XYZ和静坐标系P-UVW,如图2所示。与动平台相连的4个球副的中心点为Ai(i=1,2,3,4),与静平台相连的3个球副的中心点为Bi(i=1,2,3),SP支链的连杆与静平台相连的位置中心点为B4。Ai与Bi分别相连所组成的图形均为正方形,设OA1=a,则Ai点的坐标分别为A1(a,0,0)、A2(0,a,0)、A3(-a,0,0)、A4(0,-a,0);
Bi点的坐标分别为B1(XB1,YB1,ZB1)、B2(XB2,YB2,ZB2)、B3(XB3,YB3,ZB3)、B4(XB4,YB4,ZB4)。

图2 创建动平台和静平台的坐标系
并联机构中3条SPS支链对动平台不产生约束作用,因此机构的约束螺旋仅由SP支链提供。在动坐标系O-XYZ中,SP支链的运动螺旋系表示为:
(1)
其中:d、m、n分别为移动副P42在运动副轴线上的方向余弦。
通过计算可以得出SP支链的约束螺旋为:
$1=(1,0,0;0,-d/m,a).
(2)
$2=(0,1,0;-a,0,-n/m).
(3)
式(2)的约束螺旋是一个平行于X轴的力线矢,约束了X轴方向的平移。式(3)的约束螺旋是一个平行于Y轴的力线矢,约束了Y轴方向的平移。
根据螺旋理论得出该机构拥有4个自由度,分别是绕X轴、Y轴、Z轴的转动以及沿Z轴的移动。
给出动、静平台在空间的位置和姿态,求各杆长即各移动副的位移,这就是机构的位置逆解,针对该机构就是求解4个移动副的驱动位移l1、l2、l3、l4。将与静平台和动平台相连接的8个运动副的中心点分别连接构成两个正方形,其边长分别为2l和2L。图2中,Ai和Bi(i=1,2,3,4)的坐标可以表示为:
A1=(L,0,0)T,A2=(0,L,0)T,
A3=(-L,0,0)T,A4=(0,-L,0)T.
B1=(l,0,0)T,B2=(0,l,0)T,
B3=(-l,0,0)T,B4=(0,-l,0)T.
通过公式(4)运用坐标变换的方法将动坐标系中的各点变换到静坐标系中去,即:
(4)

其中:[T]为静平台位姿的方向余弦矩阵;
s表示sin;
c表示cos;
α、γ、β分别为并联机构绕X轴、Y轴和Z轴的转动角度;
Tqj分别表示方向余弦矩阵中的每一项,q表示行数,j表示列数;P为动坐标系的原点在静坐标系中的坐标,P=[XPYPZP]T。
各支链的驱动杆长可通过公式(5)求得:
(5)


(6)
将并联机构模型导入到ADAMS软件中,设置机构的材料属性,并建立机构所需要的约束,添加运动副。在ADAMS中给静平台添加固定副使其固定,再分别给相应的运动副添加移动副和球副等,在对应的运动副上添加驱动函数20*sin(0.5*time),然后进行仿真。
3.1 正解仿真
并联机构的正解计算都十分复杂,有些甚至不能通过计算得到结果,所以大多数情况都是用仿真来求解。用ADAMS软件对并联机构进行仿真,运行结束后选择动平台为研究对象,得到动平台在空间中的速度仿真曲线,如图3所示。

图3 正解仿真得到的动平台速度曲线
由图3可知,动平台只有在Y轴方向上速度有较大的变化,X轴和Z轴方向上都趋于稳定。
3.2 逆解仿真
在并联机构4条支链的移动副处添加驱动函数。在SP支链的移动副添加驱动函数10*sin(0.5*time),在3条SPS支链的移动副添加驱动函数5*sin(0.5*time)。
选择动平台中心点为驱动点在ADAMS中进行仿真运算。运算完成后,得到动平台在空间中的速度仿真曲线,如图4所示。

图4 逆解仿真得到的动平台速度曲线
总体来看,动平台的速度变化曲线连续光滑,未发生明显的突变且无断点,表明该机构能够平稳运行。通过仿真分析可以看出,3-SPS/SP并联机构的运动性能良好。
设定3-SPS/SP并联机构的结构参数为:圆形动、静平台的半径分别为r=50 mm、R=65 mm;
4条支链的初始杆长均为70 mm,所能达到的最大杆长均为140 mm。将设定好的数值代入到MATLAB编好的程序中,通过MATLAB的运行获得可达工作空间,并将可达工作空间转化为3个坐标平面的平面图,如图5所示。

图5 平联机构的工作空间平面图
从图5中可以看出,并联机构在3个平面内的工作空间都比较大,且工作空间没有空洞,形状比较规则,说明并联机构的工作空间良好。
将基于3-SPS/SP并联机构所设计的喷漆装置应用于桶状物体表面的商标喷涂,可以很好地提高工作效率。该设备由3-SPS/SP并联机构、传送平台(用于将需要喷涂的桶状物运输到固定位置)、喷涂装置(安装在动平台底部中心)以及支撑装置(用于固定并联机构)组成。在并联机构的4条支链上分别安装电机来作为整个装置的驱动,通过4条支链的运动带动动平台运动,进而使得喷漆装置能够实现在工作空间内的喷漆工作。通过中间移动副的同时移动来调整动平台在Z轴方向上的位置,当需要在偏左或者偏右的位置进行喷漆时,只需要通过调整移动副来改变动平台的角度,例如需要在偏左的位置喷漆时,将右侧支链伸长,使动平台向左侧倾斜达到所需要的角度。
通过在桶状物表面喷刻文字的仿真来验证该机构可以完成在桶状物表面进行喷漆的工作。在自来水水桶表面上喷刻“顺广泉水,订水电话******”几个字的仿真图如图6所示。表明该机构在实现桶状物表面商标的喷涂上完全具有可行性。

图6 实例仿真图
猜你喜欢喷漆支链并联支链氨基酸对寿命调控作用的研究进展中华老年多器官疾病杂志(2022年10期)2022-11-21喷漆废气环保治理措施分析资源节约与环保(2022年8期)2022-09-20干式喷漆室的商用化上海涂料(2021年5期)2022-01-15识别串、并联电路的方法中学生数理化·中考版(2021年10期)2021-11-22审批由“串联”改“并联”好在哪里?中国环境监察(2016年7期)2016-10-23汽车小损伤免喷漆无损修复技术汽车维护与修理(2016年10期)2016-07-10并联型APF中SVPWM的零矢量分配通信电源技术(2016年1期)2016-04-16一种软开关的交错并联Buck/Boost双向DC/DC变换器通信电源技术(2016年5期)2016-03-223UPS-S并联机构单支链驱动奇异分析北京航空航天大学学报(2014年1期)2014-12-19汽车喷漆流水线的应用与研究汽车维修与保养(2014年12期)2014-04-18栏目最新:
- 2024年度在理论学习中心组关于群众路线...2024-01-16
- 在退役军人事务工作领导小组会议上讲话...2024-01-15
- 中秋国庆队伍教育管理工作动员部署会议...2024-01-15
- 2024年度区委书记在文旅农康融合发展大...2024-01-14
- 医院纪检监察干部队伍教育整顿个人党性...2024-01-14
- 教师演讲稿:牢记育人使命,涵养高尚师德...2024-01-13
- 2024年组织部长在市委理论学习中心组专...2024-01-13
- 2024年区人民法院案件质量评查办法(2篇...2024-01-13
- 2024年区长在指导某街道干部作风建设动...2024-01-11
- 在公司成立周年大会上讲话(3篇)(完整...2024-01-10
相关文章: