基于特征匹配的变电站巡检机器人设备识别
张云翔,李智诚
(深圳供电局有限公司,广东 深圳 518022)
变电站的运行以及维护[1]是保证电力系统稳定的基础,是电力系统中最重要的工作,但利用人工对变电站进行巡检会大概率出现变电站故障[2]遗漏的情况,而通过机器人巡检可有效降低这种情况的发生率,机器人巡检[3]可直接获取设备图像,进而减少因人员失误带来的误差,同时可最大程度降低人员成本,目前机器人设备识别方法存在局限性,同时可靠性差,为进一步加强机器人对设备的识别能力,现对机器人设备识别技术展开研究。
刘小波[4]等人首先构建深度学习CRNN模型,粗略地对仪表数字区域进行第一次识别,其次综合attention机制,将模型进行扩展处理,进一步对仪表设备进行识别,加强识别正确率,实现变电站巡检机器人数字仪表设备识别。李全鹏[5]等人首先提取出仪表中的信息,并在中值滤波的基础上完成信息去噪,其次对数据进行分割处理,最终在三次样条插值法的基础上分割出所有识别结果,并与固定阈值比较,生成最终识别结果,实现变电站巡检机器人数字仪表设备识别。
以上两种方法未对设备图像进行定位处理,导致在实际识别过程中将其他部位的数值视为设备数值进行识别,存在设备识别准确率低、设备识别效果差和指针定位精度低的问题。为了解决上述方法中存在的问题,提出基于特征匹配的变电站巡检机器人设备识别方法。
变电站利用机器人巡检[6]后会直接获取大量设备图像,图像中包含变电站相关数据,图像的预处理[7]就是为了可以准确定位到图像内的数字区域并对其进行去噪等处理提高设备数值识别精度,根据变电站的实际使用状况对原始图像进行降噪等预处理,得出数字区域的精确位置后将设备内数字进行分割,以此简化数字特征匹配[8]和识别。
1.1 设备图像定位
假设任意选取的两幅设备图像分别为Q1(x,y,t1)和Q2(x,y,t2),其中t1和t2分别是两幅图像的初始时间,机器人获取的每幅图像中均含有一个待识别跟踪的对象,将其标记为l(xe,ye),其中(xe,ye)为质心坐标。
假设图像Q1和Q2的质心分别为(xe1,ye2)和(xe2,ye2),e1和e2均表示图像的相应坐标位置。
在实际定位过程中,首先将t1时刻的颜色信息进行转换并保存到相应数据库内,其次将t2时刻的颜色信息转换成t1相同的形式,并与空间内的信息进行比较,排除相同颜色信息,完善颜色信息,最终在椭圆检测方法下对各个颜色区域信息进行检测,确定出目标对象质心位置(xe2,ye2)。
利用质心(xe2,ye2)得出目标对象的原始运动速度,其表达式为
(1)
式中:V为机器人对变电站巡检时目标对象的原始运行速度,m/s;
e1和e2为跟踪目标的质心位置;
Δt为时间的变化量,s。
进而得出目标对象在图像中的最大运行速度为
(2)
式中:Vmax为目标对象在运行过程中的最大速率,m/s;
ΔK为图像的宽度,m;
H为图像的高度,m。
通过加权动态变化[9]确定目标图像的位置确定,图像的加权系数计算公式为
α1+i=‖Vmax‖×‖V‖
(3)
式中:α1+i为第1+i幅图像的加权系数。
通过目标对象的原始运行速率以及加权公式即可确定出设备图像颜色区域的位置,即确定出目标对象的实际位置,进而确定出设备图像的位置定位。
机器人在巡检过程中会因为外界因素的影响导致图像带有一定的噪声以及阴影等,因此对目标图像完成定位后需要进一步对图像进行去噪以及图像分割等处理,以此提高设备识别精度。
1.2 图像分割、去噪以及二值化处理
为提取设备各区域特征,需对图像进行分割处理[10],排除提取过程中的干扰因素,在分割过程中为降低分割难度可提前对图像进行灰度化处理,在标准平均法的基础上得出图像的灰度值,其表达式为
m=0.30R+0.11B+0.59G
(4)
式中:m为图像经灰度化处理后的灰度值;
B、G和R均为图像相应的颜色向量。
经过灰度化处理的图像均带有均一值,可通过灰度图像二值化方法消除干扰因素,最终仅保留有用数据。
图像的二值化处理实质就是在固定阈值的基础上将图像中的像素分类成黑色和白色两种,由于电力系统的变电站常年在户外,其周围常年有其他异物的遮挡,而导致图像的光照不均,在图像中出现多块阴影区域,而图像的二值化刚好可以消除这种问题带来的影响。
假设机器人巡检仪器图像的模板大小为(2n+1)×(2n+1),令该图像质心坐标为(x,y),则图像中各像素的相应阈值为
(5)
式中:R(x,y)为各像素点的二值化阈值;
m(x,y)为质心的灰度值。
灰度图像的二值化处理计算公式为
(6)
式中:U(x,y)为灰度图像经过二值化处理后各像素的强度。
由于二值化处理未能对目标进行去噪,因此需要进一步细化图像,即提取图像特征,利用特征表达图像,最终获取到带有像素宽度的线条图像。在细化图像的方法中,击中/不击中变换算法具有细化速度快和效果好的优点,从而选取该算法进行图像的细化,该算法的核心思想就是在部分固定结构元素的基础上不断消除击中变换的元素,从而消除目标对象的噪声,以此完成图像的细化处理。
假设随机选取的待细化图像为O,其补集为O′,图像中的结构元素为P,P中包含P′和P″,三者之间的关系为
P=P′∪P″
(7)
式中:P′为图像内部的结构元素;
P″为图像外部的结构元素。
其中,击中击不中变换算法的计算公式为
O×P=(OΘP′)∩(O′ΘP″)
(8)
式中:Θ为形态学腐蚀计算符号。
在结构元素P的基础上将图像O进行细化,其计算公式为
O⊗P=O-(O×P)
(9)
图像O的细化实质就是删除图像O中被元素P击中的元素,从而得到的图像。
为方便运算,假设结构元素中有序列对,其表达式为
{P}={P1,P2…,Pi}
(10)
通过结构元素的序列完成图像的细化,直到序列中的每种元素全部对图像完成细化后停止细化,以此实现图像的细化,则根据结构元素序列对图像细化的计算公式为
O⊗{P}=(…((O⊗P1)⊗P2…)⊗Pn)
(11)
以此完成图像的去噪以及灰度化处理,利用处理后的图像在水平投影算法的帮助下完成图像分割,进而完成图像的预处理。
在对设备识别[11]的过程中,Hough变换是机器人设备识别最常用的方法之一,其主要思想就是对定位出的图像进行数值识别,其主要作用是将图像中的圆以及直线等形状完整且准确地提取出来,该算法的主要步骤就是通过映射图像获取共同特征以此生成以数个点构成的峰值,利用峰值对形状进行监测进而完成分离。
此方法最关键的步骤就是得出目标形状中心点的位置,由于设备中所有形状均通过设备中心点,因此将设备中心视为所有形状的中心,运用斜截式方程描述各个形状,其公式为
y=cx+k
(12)
式中:(x,y)为中心点的坐标;
c为横坐标x的系数;
k为线段的斜率。
在计算过程中必须保证所有形状都通过中心点(x,y),将其利用公式进行表示为
k=-xc+y
(13)
在同心圆环搜索法[12]的基础上对预处理后的图像进行识别录入,假设设备中指针的中心即为圆心,选取不同的半径绘制出数个同心圆,并记录各个同心圆和指针间的交点,计算出指针斜率后完成设备读数。
假设在仪表盘中共得出3个同心圆,令三个同心圆与其相应指针的交点为D、F和G,在D、F和G三点间存在三组线段,分别为DF、FG和DG,其中D点坐标为(x1,y1)、F点坐标为(x2,y2)和G点坐标为(x3,y3),进而得出三个点相互之间线段的斜率,其表达式分别为
(14)
式中:k1为线段DF的斜率;
k2为线段FG的斜率;
k3为线段DG的斜率。
三个斜率的平均值表达式如式(15)所示:
(15)
而斜率的平均值又可用式(16)进行描述:
k=tanβ
(16)
式中:β为关于零度基准线的指针角度。
通过斜率的指针角度即可完成设备读数。
在尺度空间极值的基础上对读数进行检测,得出尺度空间以及二维图像空间的极值,并利用拟合三维二次函数精确得出数字点的位置和尺度,进而得出数值的特征向量。
由于经过预处理后的图像仅含有黑色和白色两种像素,由于经过分割处理后的图像更简洁明了,为进一步提高数值读取精度,根据设备特点,将分割后的图像进行归一化处理可降低小数点对结果带来的影响,经总结得出数字图像的相关公式为
(17)
式中:Z(s)为实际读数与真实数值之间的差异;
M为每个像素对应的归一化矩阵。
由于实际读数与真实数值之间成反比,因此,当Z(s)数值越大,即证明读数越准确。
将计算出的特征向量利用式(17)进行匹配,得出数值最大的前两个关键点,当两点之间的比小于固定阈值,则接收特征匹配点,以此类推,不断得出样本匹配点,即可完成设备的精确识别。
将最终结果进行记录,并将其保存到数据库内,以便工作人员获取最详细的变电站巡检结果。
为了验证基于特征匹配的变电站巡检机器人设备识别方法的整体有效性,现对所提方法、文献[4]方法和文献[5]方法进行设备识别准确率、设备识别效果和指针定位精度的测试。
3.1 仪表设备识别准确率
变电站巡检机器人主要作用就是快速准确获取变电站的相关数据,并准确识别仪表设备中的结果,为得出最优识别方法,可将识别结果的准确性视为检测指标。
在相同环境下利用三种方法对任意十组仪表设备进行识别,记录其识别准确率,并将三种方法的结果进行比较,得出最优方法,其结果如表1所示。

表1 三种方法的仪表设备识别准确率 %
将表1中的结果进行比较后发现,任何实验下均是所提方法的结果准确率最高,文献[4]方法的准确率较所提方法较差,但该方法仍有可取之处,而文献[5]方法的结果实在差强人意,其准确率过于低,所提方法之所以能保证仪表设备识别准确率高是因为在仪表设备识别前对仪表设备图像进行定位处理,缩小识别范围,排除识别干扰因素,降低错误识别的概率,提高识别精度,以此提高识别准确率。
3.2 仪表设备识别效果
仪表设备识别过程中为降低图像颜色等影响会对其进行灰度化处理,灰度化处理后的图像会在一定程度上增强识别效果,因此可通过对比仪表设备识别效果得出最优识别方法。
在电力系统中随机采集一张仪表设备图像,对比在正常光照下的仪表设备识别效果,其结果如图1所示。
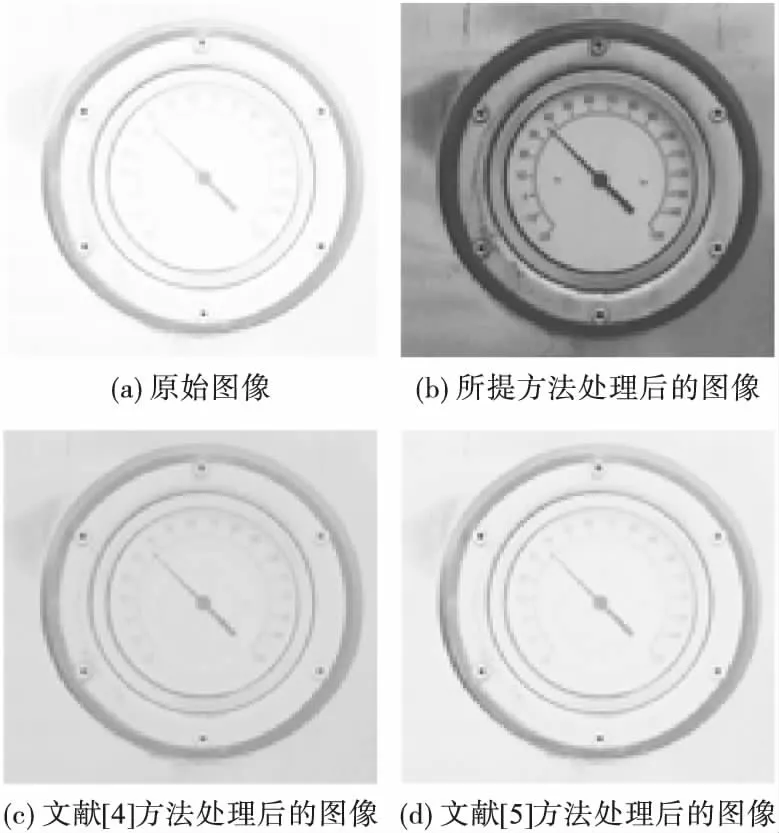
图1 三种方法在正常光照下对图像的识别效果
根据图1可知,由于外界光照影响,原始图像出现过度曝光的问题,经过三种方法处理后均有所改善,可有效看出其中数值,但只有所提方法的数值识别最明显,由此可得出所提方法为最优仪表设备识别方法。
为进一步验证所提方法的优越性,在反光条件下测试对比三种方法的实验结果如图2所示。
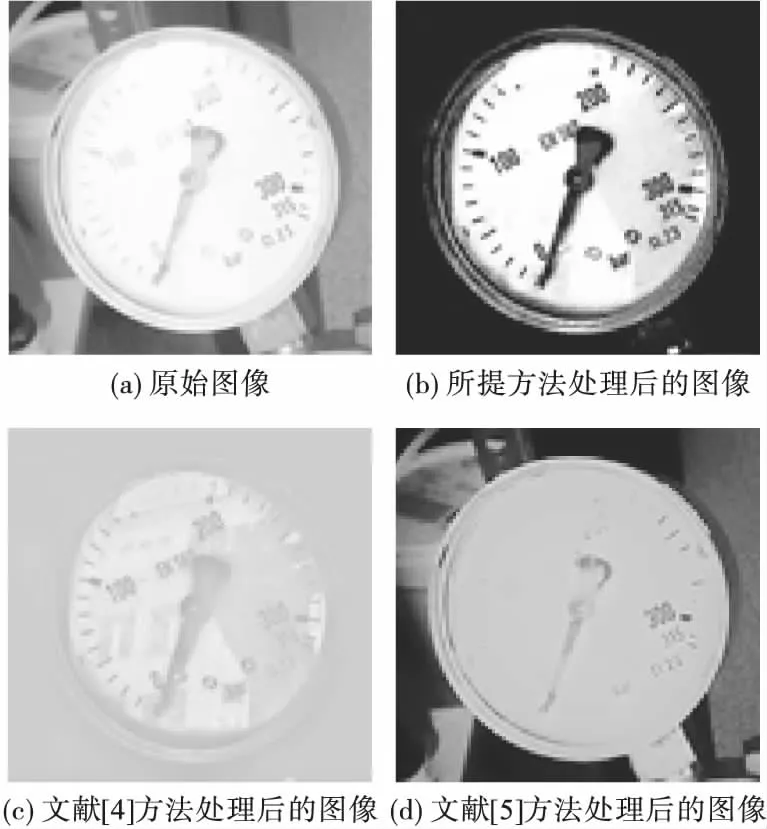
图2 不同方法下反光状态下的图像识别效果
将图2中各个方法的识别效果进行对比,仍是所提方法的识别效果最佳,因此证明所提方法是真实有效的最优识别方法。
3.3 仪表设备指针定位精度
在对仪表设备识别的过程中,最关键的步骤就是指针的定位,不同方法对指针的定位也不尽相同,但指针定位的精确度要求严格,稍有偏差就会导致结果出现误差,利用三种方法对同一仪表盘的指针进行定位,定位结果如图3所示。

图3 三种方法的仪表设备指针定位结果
根据结果显示,所提方法可有效定位指针的中心位置和斜率,因此其定位结果与真实指针位置完全重合,而其余两种方法在定位过程中仅能准确定位指针一端,无法精确定位指针位置,所以最优识别方法为所提方法。
利用机器人进行设备识别可有效降低人工成本,而通过特征匹配更能提高识别精度,经研究发现,机器人在采集设备图像信息过程中会出现读数不准确等问题,为解决这一系列问题,提出基于特征匹配的变电站巡检机器人设备识别方法,该方法首先对读数图像进行预处理,其次在Hough变换算法下得出指针定位,生成读数结果并录入,实现变电站巡检机器人设备识别,解决了设备识别准确率低、设备识别效果差和指针定位精度低的问题,加强变电站安全性。
猜你喜欢 指针仪表灰度 采用改进导重法的拓扑结构灰度单元过滤技术北京航空航天大学学报(2022年6期)2022-07-02◆ 仪表建筑与预算(2022年5期)2022-06-09仪表建筑与预算(2022年2期)2022-03-08Bp-MRI灰度直方图在鉴别移行带前列腺癌与良性前列腺增生中的应用价值天津医科大学学报(2021年1期)2021-01-26垂悬指针检测与防御方法*软件学报(2020年6期)2020-09-23热工仪表自动化安装探讨的认识通信电源技术(2018年5期)2018-08-23为什么表的指针都按照顺时针方向转动广东第二课堂·小学(2017年9期)2017-09-28基于最大加权投影求解的彩色图像灰度化对比度保留算法自动化学报(2017年5期)2017-05-14奔驰E260车行驶过程中仪表灯熄灭汽车维护与修理(2016年10期)2016-07-10基于像素重排比对的灰度图彩色化算法研究浙江理工大学学报(自然科学版)(2015年7期)2015-03-01栏目最新:
- 2024年度在理论学习中心组关于群众路线...2024-01-16
- 在退役军人事务工作领导小组会议上讲话...2024-01-15
- 中秋国庆队伍教育管理工作动员部署会议...2024-01-15
- 2024年度区委书记在文旅农康融合发展大...2024-01-14
- 医院纪检监察干部队伍教育整顿个人党性...2024-01-14
- 教师演讲稿:牢记育人使命,涵养高尚师德...2024-01-13
- 2024年组织部长在市委理论学习中心组专...2024-01-13
- 2024年区人民法院案件质量评查办法(2篇...2024-01-13
- 2024年区长在指导某街道干部作风建设动...2024-01-11
- 在公司成立周年大会上讲话(3篇)(完整...2024-01-10
相关文章: