变论域自适应模糊非线性控制在蒸汽发生器液位控制中的应用
钱 虹, 邹明耀
(1. 上海电力大学 自动化工程学院,上海 200090;
2. 上海市电站自动化技术重点实验室,上海 200090)
蒸汽发生器(Steam Generator, SG)作为核电厂一、二回路重要的换热设备,其液位的高低直接影响核电厂换热效率和安全性,但面对在不同负荷段及变动工况下出现很强的非线性特性,这使得当前的蒸汽发生器液位控制系统难以得到满意的控制性能,因此为设计有效的蒸汽发生器液位控制器使其具有更好的工况适应性、鲁棒性和抗蒸汽干扰性带来了极大挑战.
目前,蒸汽发生器液位控制系统的研究主要是基于模型的控制策略和基于测量数据的控制策略,前者主要用于有被控对象的精确数学模型条件下设计控制策略,如模型参考自适应控制;
后者主要用于无被控对象数学模型条件下设计控制策略,一般加入智能控制算法,如模糊算法、神经网络算法等.在基于模型的控制策略中,蒸汽发生器液位控制策略主要是前馈-串级控制[1-3],在此基础上,Salehi等[4]提出了一种增益调度分数阶比例-积分-微分(PID)控制系统,以积分时间绝对误差性能为指标,综合考虑期望的幅相裕度,对控制器参数进行整定.文献[5]利用软件模态组态方法建立了蒸汽发生器水位的全程数字化控制系统.但传统PID控制针对蒸汽发生器这类非线性、多变量系统难以取得较好的控制效果.针对传统比例-积分(PI)控制效果不佳的问题,乔静等[6]改用MCP标准传递函数整定的PI控制器进行仿真实验,但其是基于前馈-串级控制方案设计的控制系统,系统参数固定,自适应性和抗干扰特性在蒸汽发生器液位控制系统中的表现并不理想.为了进一步提高液位控制系统的控制效率,现代控制理论的控制方法被引入其中,Le等[7]基于自适应反步法设计蒸汽发生器液位复合反馈控制方案,Ansarifar等[8]设计了一种基于自适应估计的动态滑模控制方法,文献[9]基于U型管蒸汽发生器(U-Tube Steam Generator, UTSG)的分段线性输入输出模型,在大范围变功率情况下,设计了水位软约束MPC控制器.但这些控制方案完全依赖被控对象的精确数学模型,而在工业工程中,往往很难建立被控对象的精确数学模型,这使得控制作用难以达到最优.为了克服控制器过分依赖被控对象精确数学模型的问题,文献[10]在无模型自适应控制理论的基础上提出高“泛模型”无模型自适应控制方法,并用寻优算法对控制器参数进行寻优;
然而上述方法控制律计算繁琐,参数寻优无形中又增加了控制器设计的复杂性,在实际工程运用中存在着一定的局限性.随着智能控制技术的不断发展,基于数据驱动的智能控制方式被广泛应用于工业控制中,其中,模糊控制由于其依靠系统误差及其变化率自适应修正控制器参数,无需被控系统的准确数学模型的特性,对于蒸汽发生器这类非线性、多变量系统具有较好的应用前景[11-12].文献[13]利用模糊理论设计模糊控制器,利用实验数据对蒸汽发生器建模并进行控制研究,但传统的模糊控制器结构确定以后不能再进行修改,即控制器的控制规则、论域是不可更改的,这就使其自适应能力和抗蒸汽流量扰动的能力有所降低.为了适应蒸汽发生器这类多变量、非线性高的系统,模糊控制器必须能调整自身的结构和参数.由于变论域自适应算法能够利用伸缩因子细分输入输出变量论域,所以其能够在不增加模糊规则的情况下,提高模糊控制的自适应性和抗干扰能力[14-16].
本文针对蒸汽发生器液位控制系统在不同负荷段下呈现的非线性特性,提出一种基于模型在线求解最优自适应伸缩因子的变论域自适应模糊PI控制算法.首先采用模糊控制算法,利用控制系统误差及其变化率自适应调整PI控制器参数,再基于非线性系统模型构造Lyapunov函数,基于理想控制律求解最优自适应伸缩因子,并通过Lyapunov定理证明了系统的稳定性.通过仿真验证表明,变论域自适应模糊PI控制相较于传统PI控制及模糊PI控制能够更好的对不同工况段和变工况下蒸汽发生器的液位进行有效控制,并解决了控制器超限的问题,且系统具有鲁棒性.
基于模糊PI控制算法的蒸汽发生器前馈-串级三冲量控制系统结构图如图1所示,该系统以给水量为主要被控量,通过设定期望值建立主回路定值控制系统,保证主变量的稳定;
以蒸汽流量为主要扰动量建立副回路随动控制系统,它的给定值随主控制器的输出而变化,实现对系统负荷的快速跟踪.

图1 蒸汽发生器模糊前馈-串级控制系统原理图Fig.1 Schematic diagram of feedforward-cascade control system of steam generator
模糊PI控制是在传统的PI控制基础上,通过基于经验知识的模糊规则找出控制器参数Kp、Ki与系统输入输出的偏差e及其变化率ec之间的模糊关系,经过模糊推理后得到修正值ΔKp及ΔKi,在与控制器参数的初始值叠加,从而达到对PI参数在线修正的作用.
由模糊推理得到的该时刻PI参数值[17]为
(1)
式中:Kp0、Ki0为初始PI参数值;
ΔKp、ΔKi基于量化因子、模糊化、模糊推理、解模糊化以及比例因子等过程的确定得到,具体确定过程如下.
(1) 确定量化因子.
通过量化因子将误差e和误差变化率ec的实际论域量化为模糊控制器的模糊输入,其变换公式为
(2)
式中:〈 〉表示取整运算;
E、Ec代表模糊控制器的输入量;
emax、emin、ec,max、ec,min分别代表实际误差及其变化率的最大及最小值;
e、ec代表当前时刻实际误差及其变化率的值;
ke、kec表示量化因子,
(3)
(2) 模糊化.
将输入量误差e和误差变化率ec,输出量ΔKp、ΔKi的归一化论域设为[-6,6],分为7个模糊子集,分别为{NB, NM, NS, ZO, PS, PM, PB},其分别代表{负大,负中,负小,0,正小,正中,正大}.通过经验可知,各输入输出变量的实际论域分别定为e={-10,-5,-2.5,0,2.5,5,10},ec={-1,-0.5,-0.25,0,0.25,0.5,1},ΔKp={-1,-0.5,-0.25,0,0.25,0.5,1},ΔKi={-0.1,-0.05,-0.025,0,0.025,0.05,0.1}比较合适.
(3) 模糊推理.
根据模糊规则表中蕴含的模糊关系和相应的输入,推导出模糊控制的输出;
本文选择模糊集合的隶属度函数为三角型隶属函数(trimf), 其描述如下:

(4)
式中:x表示论域中的元素,即隶属函数的横坐标;
a、b、c为确定三角形隶属函数开口大小的变量.
对应控制系统响应在不同阶段对控制要求的不同,结合蒸汽发生器液位控制系统动态特性,得到模糊推理控制器参数的原则[17-18]如下:① 当误差e较大, 误差的变化率ec较大时,为了能使系统具有较快的响应速度,追踪液位设定值,此时应当提高Kp及Ki的大小,当误差e较大, 误差的变化率ec逐渐减小时,为了正确响应负荷的变化,此时应该降低Kp及Ki的大小;
② 在误差e和ec的值趋于稳态值的过程中,为了保证系统具有较快的响应速度并且具有较小的超调量,此时应当逐渐减小Kp值并逐渐增大Ki值;
③ 当误差逐渐逼近稳态值的过程中,此时的e较小,为了使系统具有较好的稳态特性,此时应该选择较小的Kp及较大Ki值.
根据以上调整原则建立蒸汽发生器液位控制系统模糊规则表如表1所示.表中:e(NB)、e(NM)、e(NS)、e(ZO)、e(PS)、e(PM)、e(PB)分别表示误差为负大、负中、负小、0、正小、正中、正大.

表1 ΔKp, ΔKi模糊规则表Tab.1 Fuzzy rule of ΔKp and ΔKi
推理语言采用“IfAandBthenC”的语言格式;推理规则采用Mamdani推理法,具体表达式如下:
μC′={φ1∧φ2}∧μC
(5)

(6)
式中:μA、μB、μC分别为模糊集合A、B、C的隶属度函数;
φ1为模糊集合A与模糊集合A′的适配度;
φ2为模糊集合B与模糊集合B′的适配度;
Ne、Nec表示模糊论域的大小;
∨表示取大运算,∧表示取小运算.
(4) 解模糊化.
将模糊推理得到的模糊量转化为执行机构能够识别的精确量U的过程称之为解模糊化,本文采用的解模糊化的方法为重心法,其具体表达式为
(7)
式中:vi、μv分别表示论模糊推理得到的域中的元素及其隶属度函数.
(5) 比例因子的确定.
通过比例因子将在模糊论域中运用模糊推理得到的结果转化为实际论域中作用于控制对象的控制量ΔKm(m=p, i),变换公式为
(8)
式中:ΔKm及LK,mU代表当前时刻及上一时刻模糊推理结果;
Δkmax,m及Δkmin,m(m=p,i)代表输出量实际论域的最大及最小值;
LK,m(m=p,i)表示比例因子,
(9)
一般模糊控制器量化因子和比例因子都是定值,在被控系统误差逐渐缩小的过程中,其论域的调节范围仍然是初始论域的调节范围,误差过小导致初始论域已很难满足系统要求的控制精度,虽然可以通过增加模糊规则来细分模糊论域,但规则数的增加无形中增大了计算量,影响控制的实时性.因此本文采用变论域的思想,用伸缩因子来调节输入输出变量的论域,进一步细分论域,在不增加模糊控制规则的基础上,通过论域控制器,不仅简化了初始论域的选择,并且提高模糊控制的自适应能力和控制精度,论域变化的原理图如图2所示.变论域的实质是当系统误差及其变化率发生变化时,输入与输出论域能随之进行调整,变论域自适应模糊控制系统结构图如图3所示.图中:α1(e)、α2(ec)为输入论域伸缩因子;
β(U)为输出论域伸缩因子;
uc为变论域模糊控制输出项.其具体的设计方法如下.
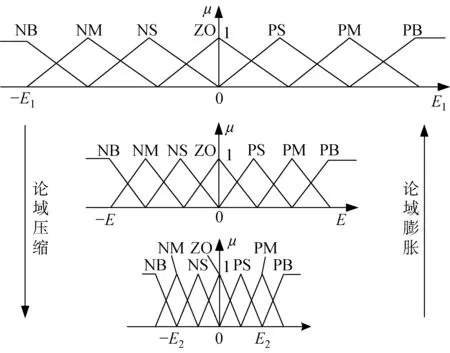
图2 论域变化原理图Fig.2 Schematic diagram of domain change

图3 变论域自适应模糊控制系统结构图Fig.3 Structure diagram of variable universe adaptive fuzzy control system
设有如下系统[18]:

(10)
式中:t为时间;
A为系统状态向量;
b为系统输入向量;
C为系统输出向量;
f(x)为未知有界连续光滑标量函数, 设|f(x)|≤F0(x)<∞,其中F0(x)为|f(x)|的上界函数;
g为未知有界常量;
u为系统控制输入项;
d为外部有界扰动.
(11)


(12)

(A-bkc)e+Cb[g(u*-u)-f(x)-d]
(13)
存在正定对称矩阵P1,使得下式成立:
(A-bkc)TP1+P1(A-bkc)=-Q1
(14)
式中:Q1为正定矩阵.

变论域自适应模糊控制器设计如下.
取系统控制律为
u=uc+us,u∈[0,100]
(15)
式中:uc为变论域模糊控制项,通过第1节所述单点模糊化、重心法解模糊以及Mamdani推理法得到;
us为监督补偿控制项,目的是消除扰动、未建模动态和模糊逼近误差的影响.
uc=
(16)
构造Lyapunov函数:
(17)
则:
(18)
取补偿控制率为
(19)
式中:sgn(·)为符号函数.
显然补偿项us是在知道未知函数f(x)和g的条件下给出的一种“粗调”控制率,本文利用变论域模糊控制项中的自适应伸缩因子实现系统控制律的“细调”,使闭环系统稳态性能达到最优.
伸缩因子β的最优参数β*设定如下:
(20)
式中:Nβ表示参数β的界;
sup表示最小上界值.
设系统目标函数为

(21)

(22)
式中:参数K1满足K1>0.
(23)
构造Lyapunov函数:
(24)
将V3对时间求导可得:
(25)

(26)
又由式(19)可得:eTP1bgus≥0.所以:
(27)
式中:λmin(Q1)为矩阵Q1的最小特征值,如果在设计过程中,使得λmin(Q1)>1,则系统目标函数:
(28)

根据上节针对蒸汽发生器液位控制系统变论域自适应模糊控制算法的设计方法,被控对象为包含副回路的广义被控对象,结合文献[19]中所提出的蒸汽发生器模型,可得到如下非线性系统:
(29)
(30)
式中:qν表示给水阀开度的非线性函数;
d(t)为蒸汽流量扰动;
y(t)为蒸汽发生器液位;
Bγ为给水流量控制输入向量;
Bν为蒸汽流量扰动输入向量.G1、G2、G3、τ1、τ2、T与功率有关,表2给出它们在5%PR、15%PR、30%PR、50%PR、100%PR这5个额定功率点处的值(PR为额定功率).图4及图5分别给出了该非线性模型在单位给水流量及蒸汽流量阶跃变化下水位的响应曲线.图中:h为水位阶跃变化趋势值,需要注意的是此处的水位零点表示水位处于参考值.因为qν在实际使用中是一维函数形式,所以其非线性特性拟合如下:

表2 蒸汽发生器液位控制系统模型参数Tab.2 Model parameters of steam generator liquid level control system
(31)
式中:ν表示阀门开度,取值范围为[0, 100%].
从图4及图5可以看出,在给水流量及蒸汽流量的阶跃变化下,蒸汽发生器水位比在短时间内均出现了相反的变化趋势,这一现象称为“虚假水位”现象,且功率点越低,“虚假水位”现象越明显,这也是在设计控制器时,需要克服的问题.

图4 给水流量阶跃变化下的水位响应曲线Fig.4 Water level response curves in a step change of feedwater flow

图5 蒸汽流量阶跃变化下的水位响应曲线Fig.5 Water level response curves in a step change of steam flow


3.1 不同工况下水位阶跃响应仿真分析
仿真模型如图6所示.本次仿真设初始水位比为0 mm,在100 s后加入液位的阶跃变化信号,幅值为100 mm,并将变论域自适应模糊控制方法与串级PI控制、模糊PI控制在不同的功率点处的系统阶跃响应进行比较,得到仿真结果如图7所示.

图6 控制系统仿真Simulink模型Fig.6 Simulink model of control system simulation
对比蒸汽发生器液位控制的仿真曲线可以看出,在初始状态均为稳态的情况下,加入阶跃信号时,3种控制方式最终都能达到设定值,但变论域自适应模糊控制方法具有更好的控制性能,不仅有极小的超调,相比之下模糊PI控制和串级PI控制都有一定程度超调,并且变论域自适应模糊控制具有更短的调节时间,克服“虚假液位”现象的能力也要优于传统PI控制及模糊PI控制,各控制器的具体控制性能指标如表3和4所示,其中调节时间的测量选择其稳态值的1%作为误差带.表中:σ为液位超调量;
Ts为液位调节时间.

表3 液位超调量Tab.3 Liquid level overshoot

表4 液位调节时间Tab.4 Adjustment time
由图7(d)和7(e)可见,本文所提出的算法能够将阀门开度约束在[0, 100%]之中,有效避免了传统PI控制及模糊PI控制没有考虑执行器阀门的约束,导致的系统超限问题.

图7 不同工况下液位阶跃响应变化曲线Fig.7 Step response curves of liquid level under different working conditions
3.2 变工况下蒸汽流量扰动仿真分析
本次仿真在100 s时加入液位的阶跃变化信号,幅值为100 mm,待系统稳态后,加入20 kg/s的蒸汽流量扰动信号,被控系统在3种不同控制方式下的响应曲线如图8所示.

图8 蒸汽流量扰动下的系统响应曲线Fig.8 System response curves in steam flow disturbance
由图8可见,在加入蒸汽流量扰动状况下3种控制方式在经历不同的时间后均能恢复到初始状态,均为稳定的控制方式,在相同的蒸汽流量阶跃扰动下,变论域自适应模糊控制相较于模糊PI控制及串级PI控制具有更好的控制性能,其动态降落量与恢复时间均要优于模糊PI控制及串级PI控制,并且可以进一步看出,高功率点下的控制性能要优于同状态下低功率点的控制性能,其动态降落量、恢复时间及克服“虚假液位”现象的性能均要优于低功率点处的表现.具体控制性能参数如表5和6所示.表中:ζ为动态降落量;
Td为液位恢复时间.
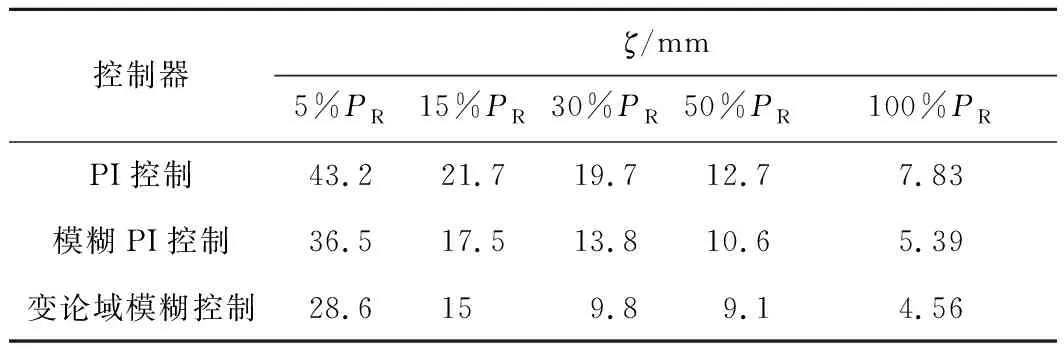
表5 动态降落量Tab.5 Amount of dynamic landing

表6 恢复时间Tab.6 Recovery time
3.3 变论域自适应模糊控制器鲁棒性分析
考虑变论域自适应模糊控制算法鲁棒性,本次仿真假定蒸汽发生器初始运行状态为稳态运行,将表2中系统参数G1由0.058更改为0.068.初始水位设定为0 mm,在100 s后加入液位的阶跃变化信号,幅值为100 mm.图9显示在变论域自适应模糊控制下系统在典型工况下阶跃响应曲线.图10为系统达到平衡后,在 1 000 s时加入20 kg/s阶跃变化的蒸汽流量信号,系统在典型工况下阶跃响应曲线.
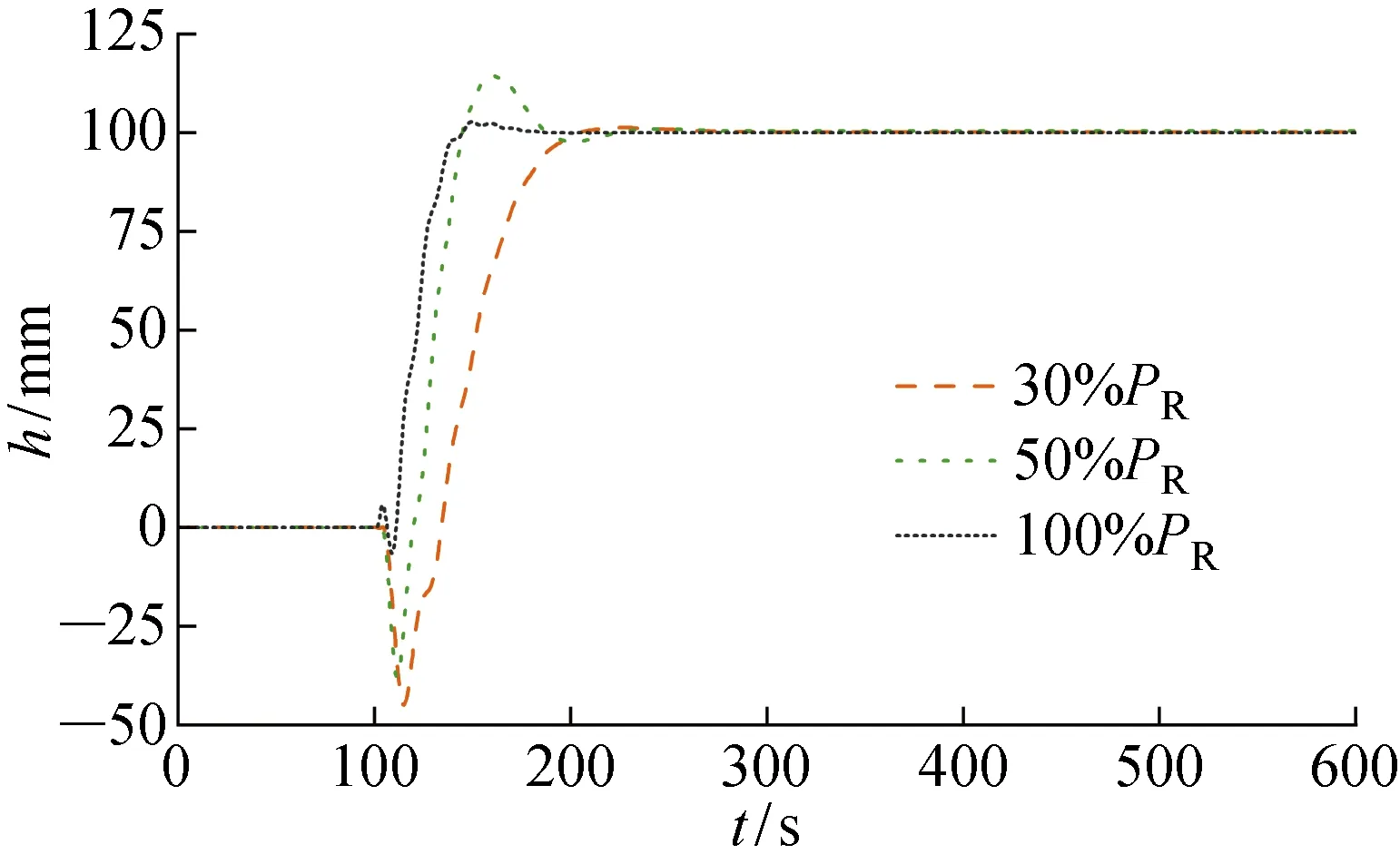
图9 不同工况下系统阶跃响应曲线Fig.9 System step response curves under different working conditions
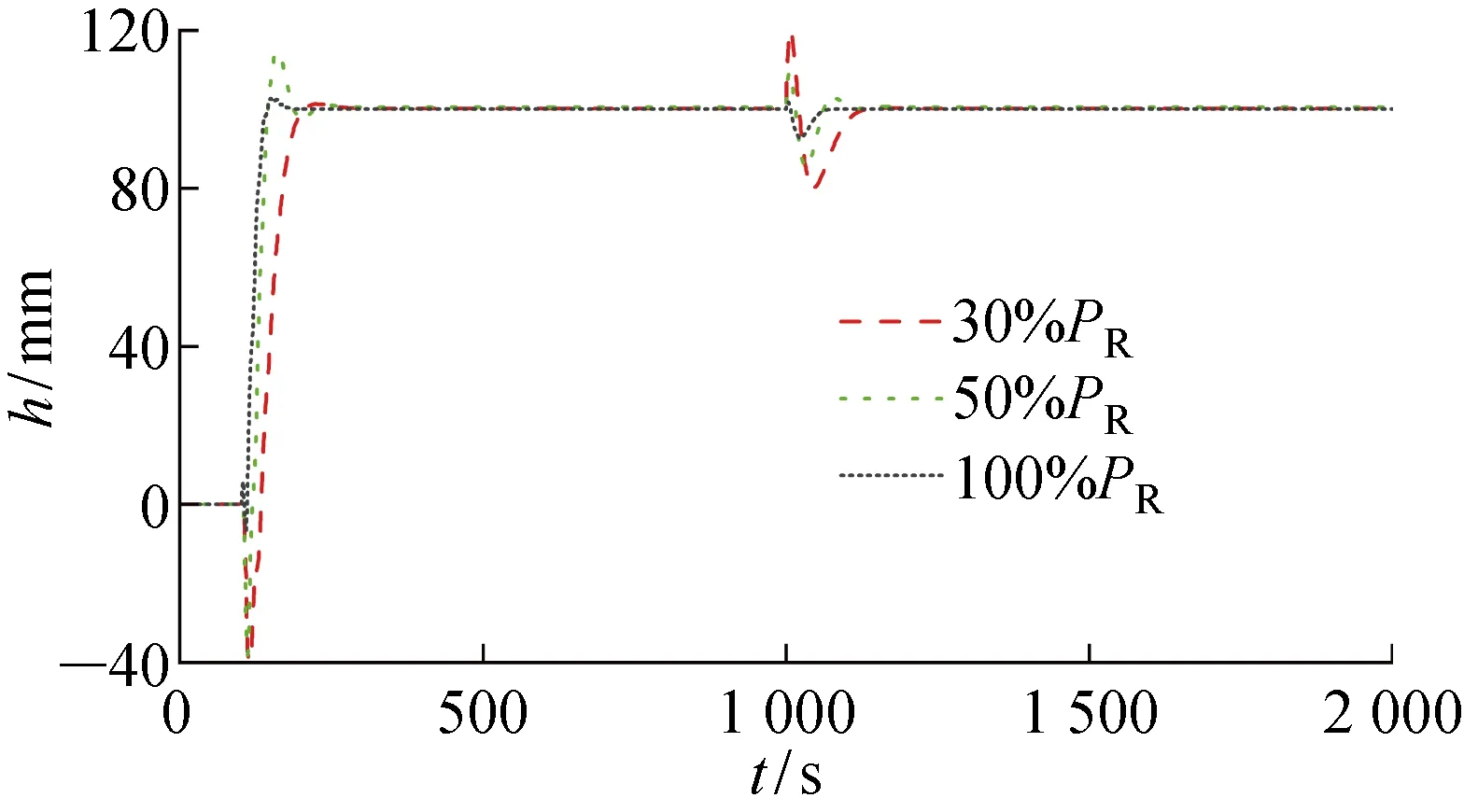
图10 不同工况下蒸汽流量扰动的系统响应曲线Fig.10 System response curves of steam flow disturbance under different working conditions
由图9可见,在变论域自适应模糊控制下,系统在各个工况条件下均能实现稳定控制,稳态误差为0,30%PR下系统调节时间为132 s,而100%PR下系统调节时间仅为78 s,控制器具有良好的鲁棒性.
由图10可见,系统受到扰动后,变论域自适应模糊控制器均能使系统重新回到稳态,在30%PR下其动态降落量为19.1%,恢复时间为247 s;
在100%PR下,最大动态降落量为9.4%,恢复时间为84 s.实验验证了变论域自适应模糊控制器具有较好的抗蒸汽流量扰动性能.
3.4 系统变负荷仿真分析
假设系统初始运行在15%PR下的0 mm稳态水位中,在100 s时对系统进行升负荷实验,使系统升负荷至50%PR,图11为不同控制方法下的系统响应曲线.

图11 系统从15%PR到50%PR的响应曲线Fig.11 Response curves of system from 15%PR to 50%PR
由图11可见,在系统升负荷的过程中,变论域自适应模糊控制器相较于串级PI控制与模糊PI控制有更好的控制性能,其超调量为17.5%,调节时间为113 s,而串级PI控制与模糊PI控制无论是在超调量还是在调节时间上均没有变论域自适应模糊控制效果好.
对蒸汽发生器液位控制系统的串级PI控制、模糊PI控制及变论域自适应模糊控制方法进行论述,通过仿真结果可以得出以下结论:
(1) 对于蒸汽发生器这类控制要求较高的被控系统,变论域自适应模糊控制可以得到比常规串级PI控制及模糊PI控制更小的超调量和更短的调节时间;
(2) 本次变论域自适应模糊控制算法的研究,使传统的模糊控制在不增加控制规则的情况下增加控制系统的自适应性能,能够更好适应工况的变化,使其在不同负荷段下均能更加精准地跟踪水位的变化值,具有更好鲁棒性和抗蒸汽扰动的能力.
(3) 对于一般控制方式,在系统中产生较大扰动或大幅度改变设定值时,系统易发生超限现象,而变论域自适应模糊控制的精准控制优势得到了很好展现,控制器未发生超限现象.
猜你喜欢论域阶跃模糊控制基于变论域模糊控制的Taylor逼近型内模PID算法成都信息工程大学学报(2021年6期)2021-02-12变论域自适应模糊PID控制系统仿真与应用测控技术(2018年10期)2018-11-25探讨单位阶跃信号的教学天津教育·下(2018年9期)2018-07-13LCSR法响应时间原位测量装置的设计与实现自动化仪表(2017年8期)2017-08-30T-S模糊控制综述与展望西南交通大学学报(2016年3期)2016-06-15双论域粗糙集在故障诊断中的应用广东石油化工学院学报(2016年3期)2016-05-17基于模糊控制的PLC在温度控制中的应用电子制作(2016年21期)2016-05-17基于模糊控制的恒压供水系统的研究通信电源技术(2016年5期)2016-03-22基于模糊控制的无人机滑跑起飞控制方法研究西北工业大学学报(2015年1期)2016-01-19“大健康”论域下城市社区体育公共服务的变革体育科学研究(2015年5期)2015-02-28栏目最新:
- 2024年度在理论学习中心组关于群众路线...2024-01-16
- 在退役军人事务工作领导小组会议上讲话...2024-01-15
- 中秋国庆队伍教育管理工作动员部署会议...2024-01-15
- 2024年度区委书记在文旅农康融合发展大...2024-01-14
- 医院纪检监察干部队伍教育整顿个人党性...2024-01-14
- 教师演讲稿:牢记育人使命,涵养高尚师德...2024-01-13
- 2024年组织部长在市委理论学习中心组专...2024-01-13
- 2024年区人民法院案件质量评查办法(2篇...2024-01-13
- 2024年区长在指导某街道干部作风建设动...2024-01-11
- 在公司成立周年大会上讲话(3篇)(完整...2024-01-10
相关文章: